Actuators and sensors. Part 1 презентация
Содержание
- 2. outline Motivation, why robots need sensors? Difference between actuators and sensors
- 3. Sensors in Robotics are primarily used for two different purposes: Sensors
- 5. Any kind of device that converts one kind of energy into
- 6. Common complete robot system
- 7. classification Robot sensors can be classified into two groups: Internal sensors
- 8. External sensors External sensors: Obtain the information in the surrounding environment.
- 9. Evaluation Criteria for Sensors Evaluation Criteria for Sensors 1. Sensitivity -
- 11. Device error Absolute Error (EA): EA = measured value – true
- 12. Tolerance (Limiting Error)
- 13. Accuracy & Inaccuracy Definition: A measure of how close the output
- 14. Example: X = 20 °C, Y = 21.3 °C , find
- 15. Analog sensor: Potentiometer Analog sensor for measuring the rotational position Potentiometer
- 16. Sensor response curve for potentiometer Used to define different kind of
- 17. Range (full scale) The difference between the minimum angle and the
- 18. Nonlinearity error
- 19. Sensitivity The amount of change in the output -> results from
- 20. Next: wide range of sensors
- 21. Скачать презентацию








:
EA = measured value – true")
")





The difference between the minimum angle and the")



Слайды и текст этой презентации
Слайд 1
Описание слайда:
Actuators and sensors. Part 1
Lecture 12
Irob 2305 Introduction to Robotics
Слайд 2
Описание слайда:
outline
Motivation, why robots need sensors?
Difference between actuators and sensors
Robotic sensor classification
Sensor Performance
Calculation of errors
Слайд 3
Описание слайда:
Sensors in Robotics are primarily used for two different purposes:
Sensors in Robotics are primarily used for two different purposes:
1. Give the robot information about itself
2. Give the robot information about its environment
Слайд 4
Описание слайда:
Слайд 5
Описание слайда:
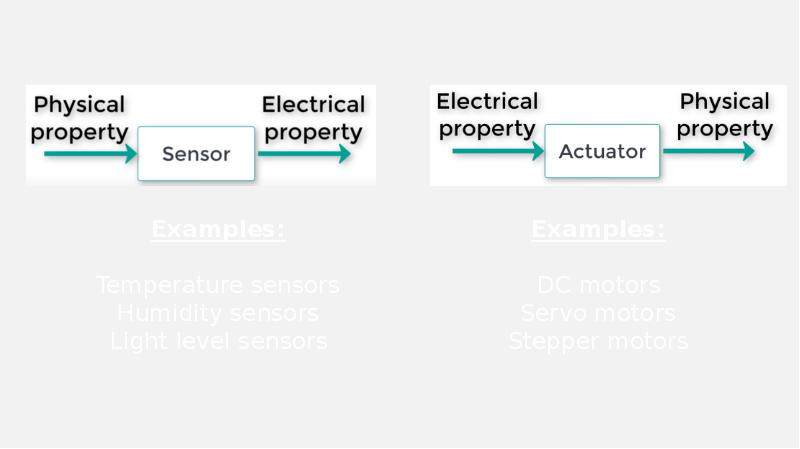
Any kind of device that converts one kind of energy into another
Sensors: input transducers
Actuators: output transducers
Слайд 6
Описание слайда:
Common complete robot system
Слайд 7
Описание слайда:
classification
Robot sensors can be classified into two groups:
Internal sensors and external sensors
Internal sensors: Obtain the information about the robot itself.
– position sensor, velocity sensor, acceleration sensors, motor torque sensor, etc
Слайд 8
Описание слайда:
External sensors
External sensors: Obtain the information in the surrounding environment.
– Cameras for viewing the environment
– Range sensors: IR sensor, laser range finder, ultrasonic sensor, etc.
– Contact and proximity sensors: Photodiode, IR detector, RFID, touch etc.
– Force sensors: measuring the interaction forces with the environment, etc.
Слайд 9
Описание слайда:
Evaluation Criteria for Sensors
Evaluation Criteria for Sensors
1. Sensitivity - how sensitive is the sensor
- usually max. sensitivity that provide linear accurate signals.
2. Linearity - operation is linear to the input.
3. Range - difference between max. & min. value.
4. Response time - faster than the sampling time in micro- processor.
5. Accuracy - different between measured and actual.
6. Repeatability - ability to repeat between several measuremets.
7. Resolution - a measure of the number of measurementy.
8. Type of output.
9. Physical consideration - weight and size.
- reliability.
- interfacing.
Слайд 10
Описание слайда:
Слайд 11
Описание слайда:
Device error
Absolute Error (EA):
EA = measured value – true value
EA = Y-X
Relative Error (ER):
ER = |EA/X|*100%
Example: X = 20 °C, Y = 21.3 °C , find ER ?
EA = 21.3 – 20.0 = 1.3.
ER = 1.3/20 *100 = 6.5 %.
Слайд 12
Описание слайда:
Tolerance (Limiting Error)
Слайд 13
Описание слайда:
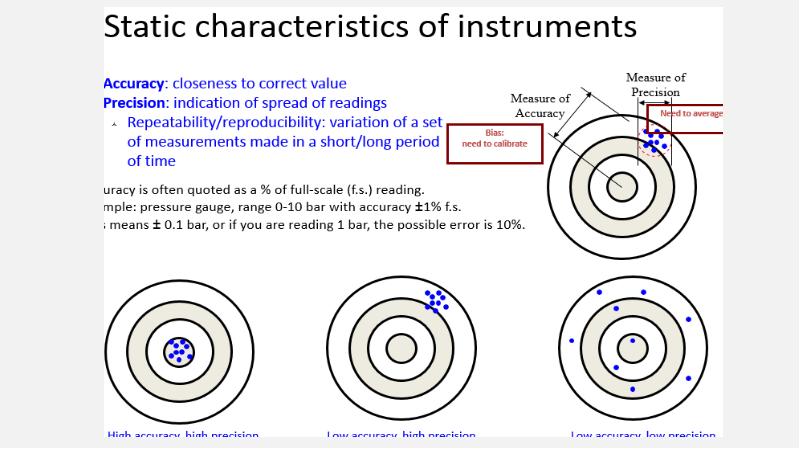
Accuracy & Inaccuracy
Definition: A measure of how close the output of the Instrument (measured value - Y) to the true value - X.
Absolute Accuracy:
Relative Accuracy:
Слайд 14
Описание слайда:
Example: X = 20 °C, Y = 21.3 °C , find AA &AR ?
Example: X = 20 °C, Y = 21.3 °C , find AA &AR ?
EA = 21.3 – 20.0 = 1.3.
ER = 1.3/20 *100 = 6.5 %.
AA = 1-0.065 =0.935.
AR = 93.5%.
Inaccuracy (Uncertainty) = 1- AA.
= ER/100.
Note: Inaccuracy is often given as a percentage of full scale (f.s) reading of an instrument.
Слайд 15
Описание слайда:
Analog sensor: Potentiometer
Analog sensor for measuring the rotational position
Potentiometer = varying resistance
Resistance changes with the position of the deal
Converts rotational angel (physical input) to resistance (electrical output)
Слайд 16
Описание слайда:
Sensor response curve for potentiometer
Used to define different kind of properties of sensor including errors.
Слайд 17
Описание слайда:
Range (full scale)
The difference between the minimum angle and the maximum angle
Слайд 18
Описание слайда:
Nonlinearity error
Слайд 19
Описание слайда:
Sensitivity
The amount of change in the output -> results from a particular change in the input
Слайд 20
Описание слайда:
Next: wide range of sensors
Скачать презентацию на тему Actuators and sensors. Part 1 можно ниже: