Review, PID controller презентация
Содержание
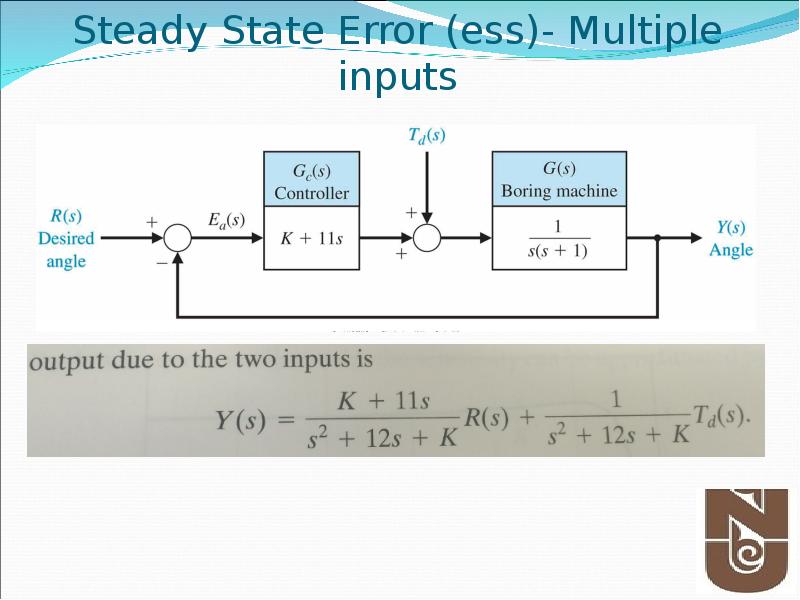
- 4. Steady State Error (ess)
- 7. Introduction Introduction
- 8. PID Control A closed loop (feedback) control system, generally with Single
- 9. When PID Control is Used PID control works well on SISO
- 10. Output equation of PID controller in time domain
- 24. Figure 4.9 Responses of P, PI, and PID control to (a)
- 25. Figure 4.10 Model of a satellite attitude control: (a) basic system;
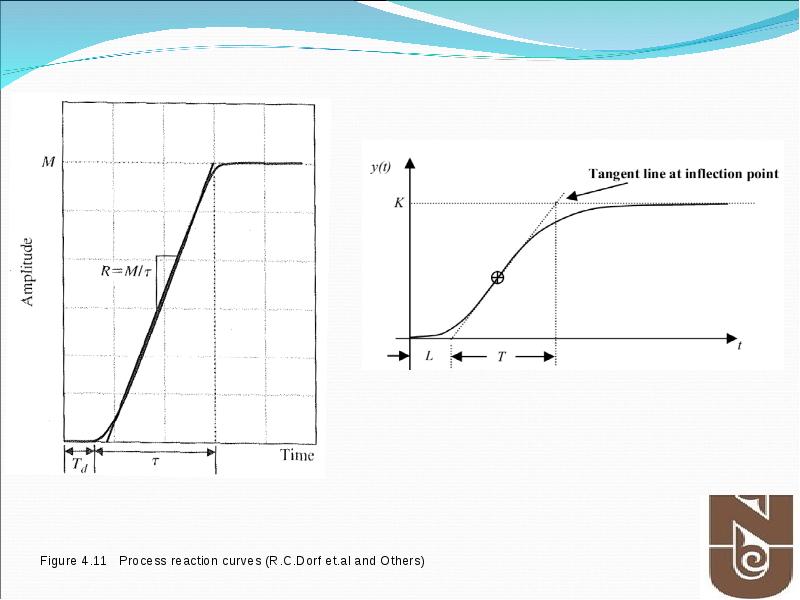
- 26. Figure 4.11 Process reaction curve
- 28. Figure 4.12 Quarter decay ratio
- 29. TABLE 4.2
- 30. Figure 4.13 Determination of ultimate gain and period
- 31. Figure 4.14 Neutrally stable system
- 32. TABLE 4.3
- 33. Further Reading Franklin, et. al., Chapter 4 Section 4.3 Richard C.
- 34. Скачать презентацию
")

 control system, generally with Single")



 basic")







Слайды и текст этой презентации
Слайд 1
Описание слайда:
Слайд 2
Описание слайда:
Слайд 3
Описание слайда:
Слайд 4
Описание слайда:
Steady State Error (ess)
Слайд 5
Описание слайда:
Слайд 6
Описание слайда:
Слайд 7
Описание слайда:
Introduction
Introduction
Слайд 8
Описание слайда:
PID Control
A closed loop (feedback) control system, generally with Single Input-Single Output (SISO)
A portion of the signal being fed back is:
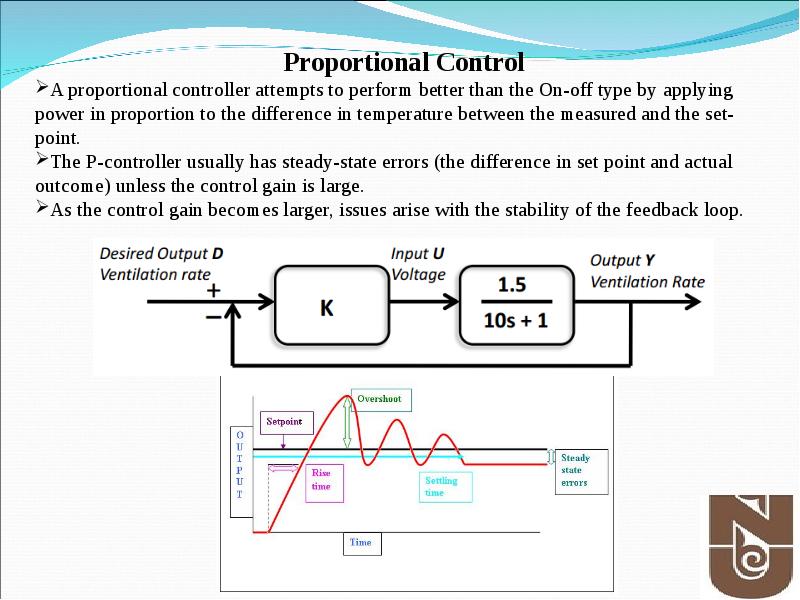
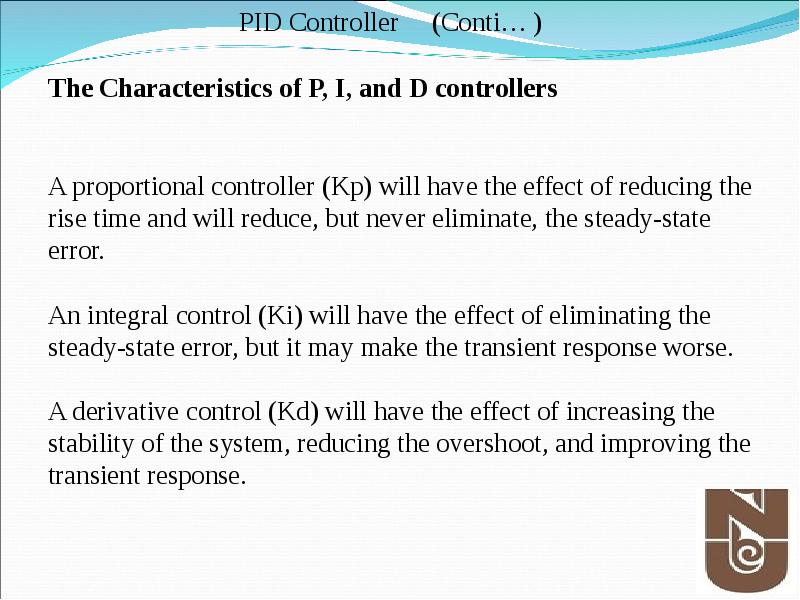
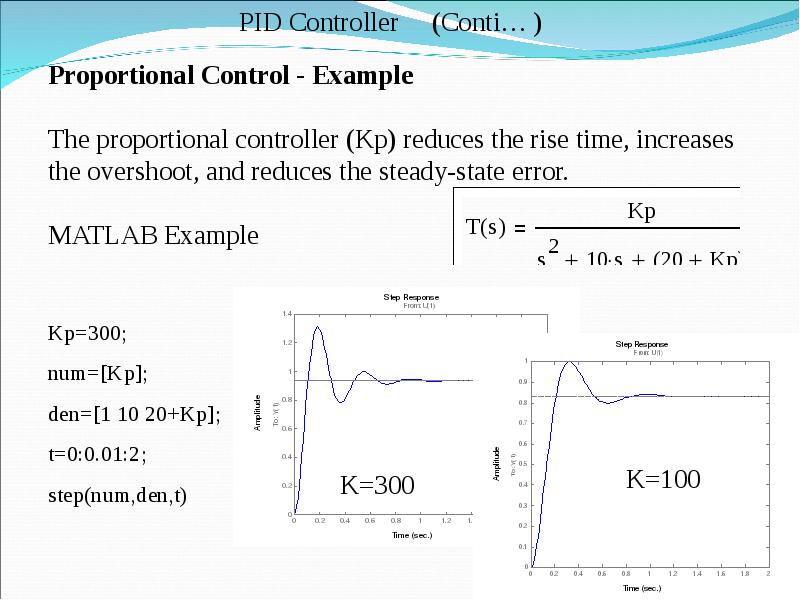
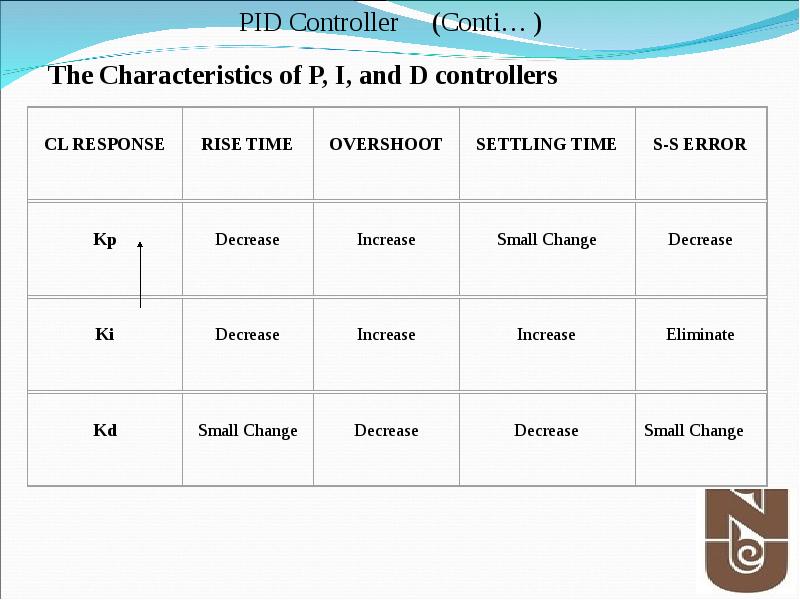
Proportional to the signal (P)
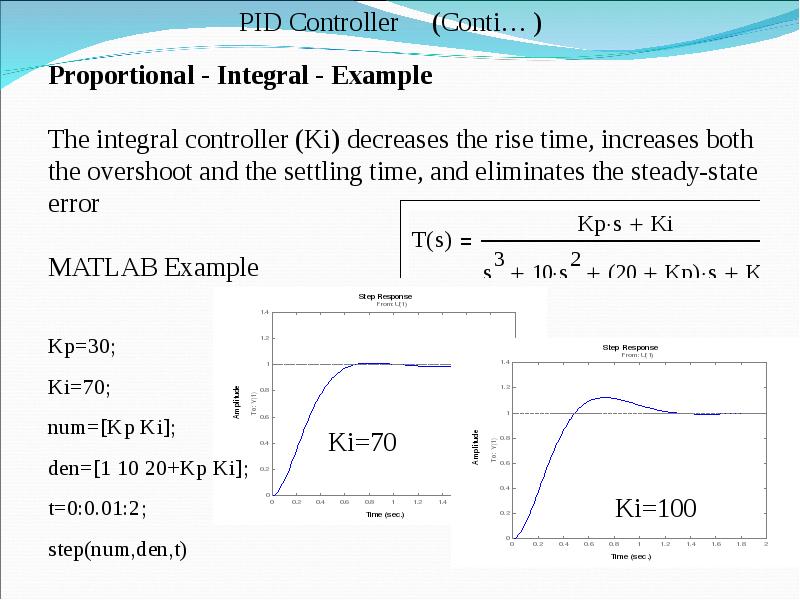
Proportional to integral of the signal (I)
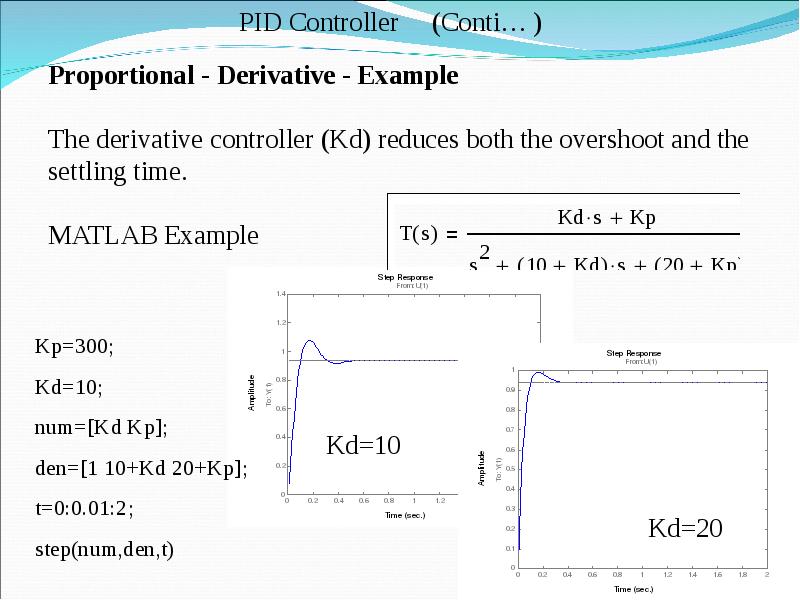
Proportional to the derivative of the signal (D)
Слайд 9
Описание слайда:
When PID Control is Used
PID control works well on SISO systems of 2nd Order, where a desired Set Point can be supplied to the system control input
PID control handles step changes well to the Set Point especially when :
Fast Rise Times
Little or No Overshoot
Fast settling Times
Zero Steady State Error
PID controllers are often fine tuned on-site, using established guidelines
Слайд 10
Описание слайда:
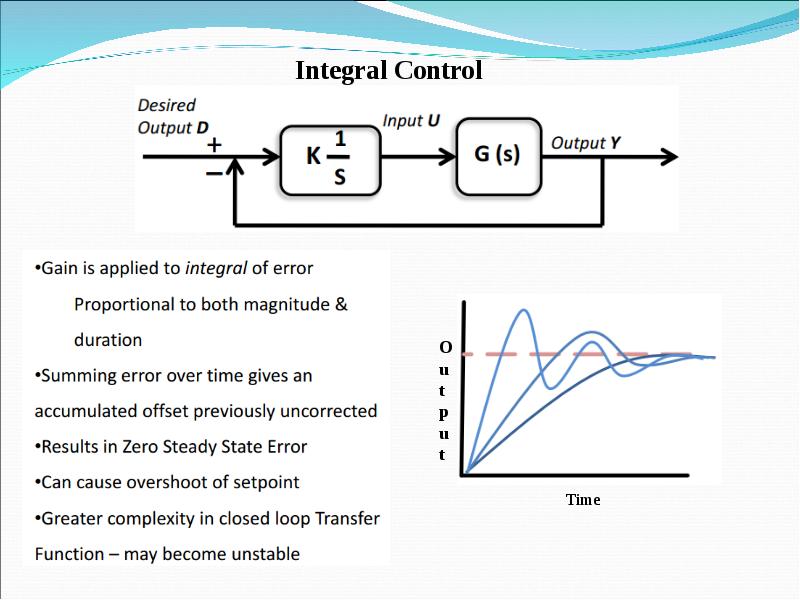
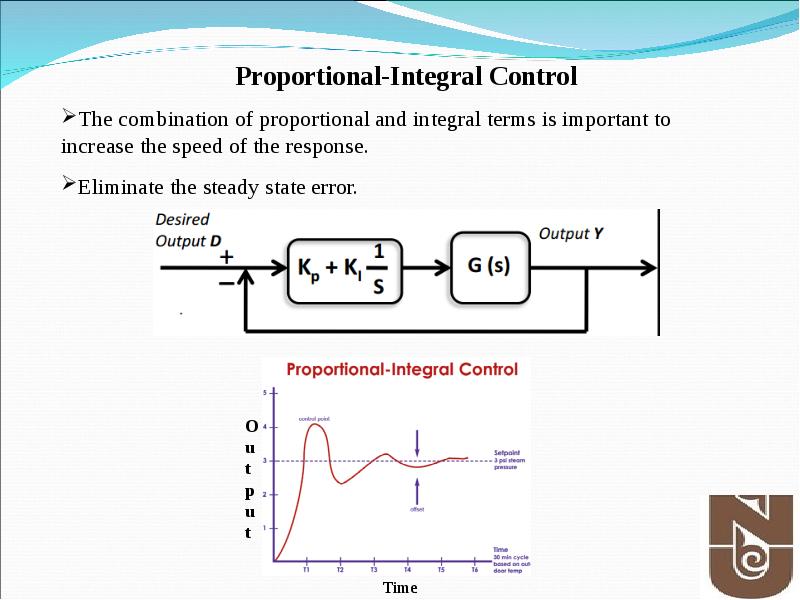
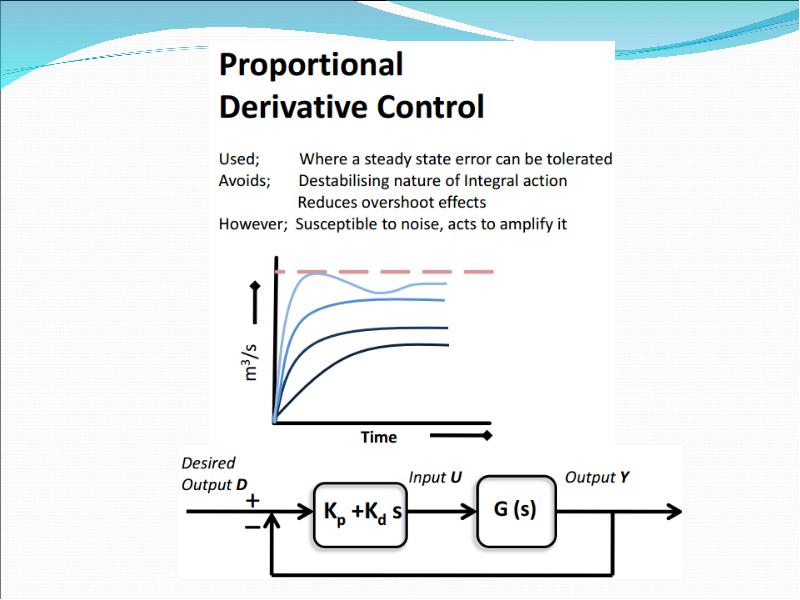
Output equation of PID controller in time domain
Слайд 11
Описание слайда:
Слайд 12
Описание слайда:
Слайд 13
Описание слайда:
Слайд 14
Описание слайда:
Слайд 15
Описание слайда:
Слайд 16
Описание слайда:
Слайд 17
Описание слайда:
Слайд 18
Описание слайда:
Слайд 19
Описание слайда:
Слайд 20
Описание слайда:
Слайд 21
Описание слайда:
Слайд 22
Описание слайда:
Слайд 23
Описание слайда:
Слайд 24
Описание слайда:
Figure 4.9 Responses of P, PI, and PID control to (a) step disturbance input (b) step reference input
Слайд 25
Описание слайда:
Figure 4.10 Model of a satellite attitude control: (a) basic system; (b) PD control; (c) PID control
Слайд 26
Описание слайда:
Figure 4.11 Process reaction curve
Слайд 27
Описание слайда:
Слайд 28
Описание слайда:
Figure 4.12 Quarter decay ratio
Слайд 29
Описание слайда:
TABLE 4.2
Слайд 30
Описание слайда:
Figure 4.13 Determination of ultimate gain and period
Слайд 31
Описание слайда:
Figure 4.14 Neutrally stable system
Слайд 32
Описание слайда:
TABLE 4.3
Слайд 33
Описание слайда:
Further Reading
Franklin, et. al., Chapter 4
Section 4.3
Richard C. Dorf et.al, Chapter 6,
Chapter 6.2
Скачать презентацию на тему Review, PID controller можно ниже: