Нелинейные системы автоматического управления презентация
Содержание
- 2. Виды нелинейных звеньев: Виды нелинейных звеньев: звенья релейного типа идеальное реле
- 3. идеальное реле с зоной нечувствительности идеальное реле с зоной нечувствительности реальное
- 4. звено с кусочно-линейной характеристикой звено с кусочно-линейной характеристикой усилитель с ограничением
- 5. звено с криволинейной характеристикой звено с криволинейной характеристикой звено, уравнение которого
- 6. Метод гармонической линеаризации относится к приближенным методам прост и универсален
- 7. Идея метода гармонической линеаризации. Условия применимости Идея метода гармонической линеаризации. Условия
- 8. предполагается, предполагается, что сигнал y(t), пройдя через линейную часть
- 10. - уравнение баланса амплитуд - уравнение баланса амплитуд
- 11. Решаются две группы задач: исследование периодических движений в нелинейных замкнутых системах
- 12. Гармоническая линеаризация нелинейностей Пусть заданная нелинейная функция При выполнении гипотезы фильтра
- 13. Предполагаем где p=d/dt где q(a) и q'(a) – коэффициенты
- 14. Для однозначной нелинейной характеристики F(x) коэффициент q'(a)=0. Для однозначной нелинейной
- 15. Замена исходного нелинейного уравнения приближенным уравнением для первой гармоники называется гармонической
- 16. Исследование устойчивости периодических движений методом гармонической линеаризации Запишем уравнение замкнутой гармонически
- 17. Характеристическое уравнение гармонически линеаризованной нелинейной САУ: Характеристическое уравнение гармонически линеаризованной нелинейной
- 18. определяются параметры ПД aп и ωп. определяются параметры ПД aп
- 19. Если при положительном приращении амплитуды ∆a>0 кривая Михайлова займет положение 1-1,
- 20. Частотный метод исследования устойчивости ПД в НС Л. С. Голдфарба (1946
- 21. s=jω s=jω решим полученное уравнение относительно неизвестных aп и ωп .
- 24. Оба годографа и строятся на одной комплексной плоскости. Оба годографа и
- 27. Критерий абсолютной устойчивости В. М. Попова
- 28. линейная часть системы устойчива линейная часть системы устойчива Абсолютная устойчивость нелинейной
- 29. Теорема. Если замкнутая система состоит из устойчивой линейной части с передаточной
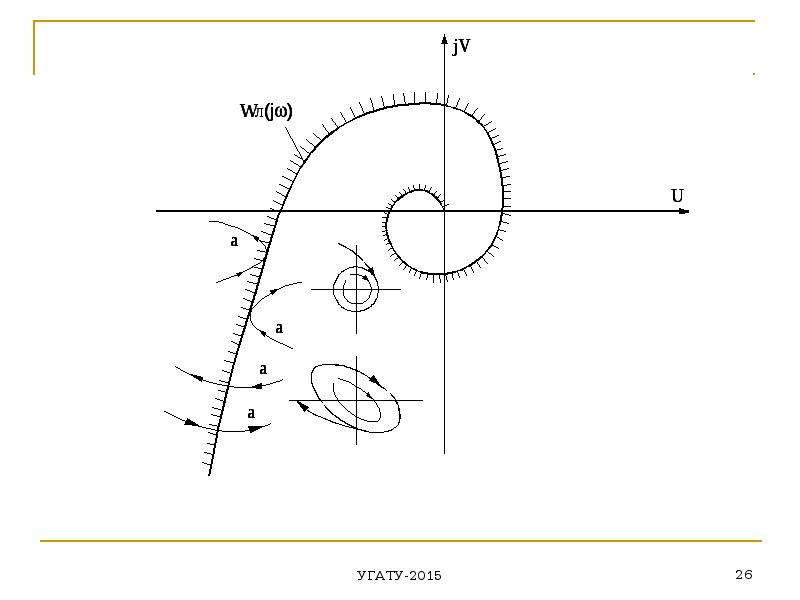
- 30. Геометрическая интерпретация теоремы. Геометрическая интерпретация теоремы. введем видоизмененную частотную характеристику обозначим
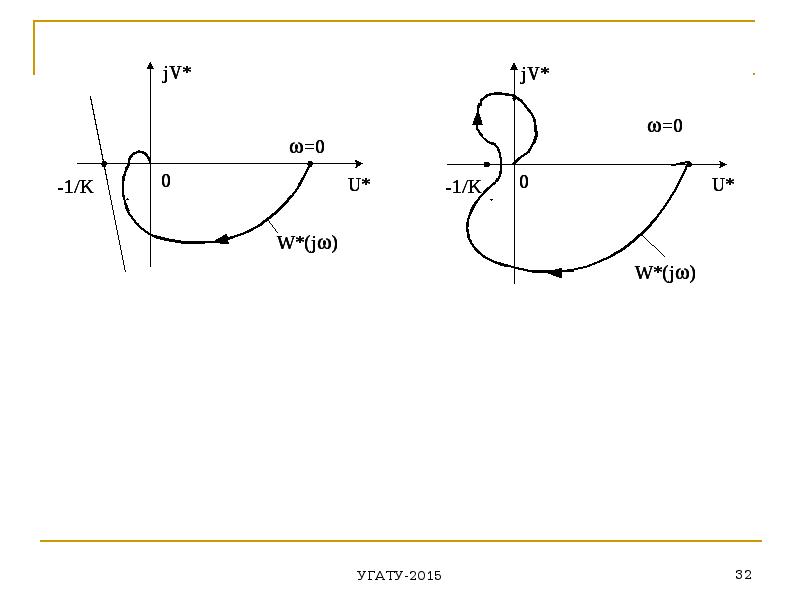
- 31. (4) определяет собой прямую линию на плоскости ,
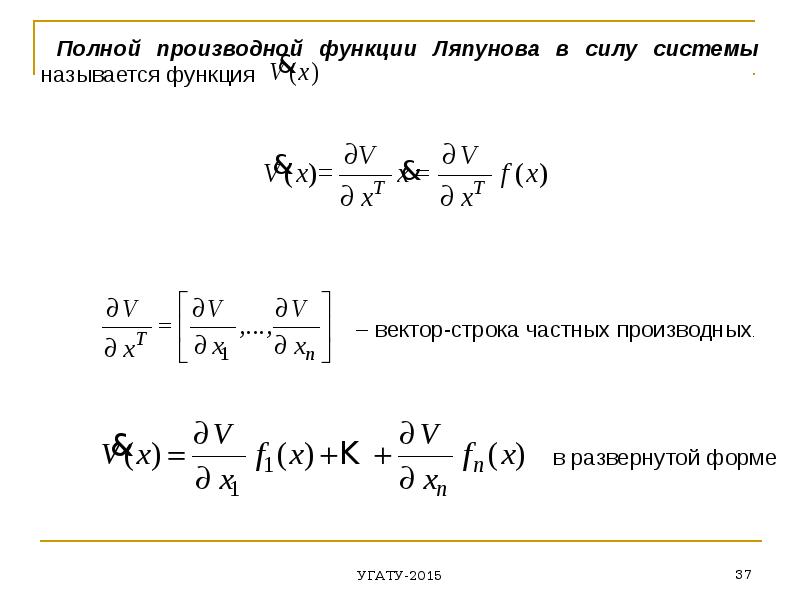
- 33. Второй метод Ляпунова не требует нахождения решения дифференциального уравнения основная идея
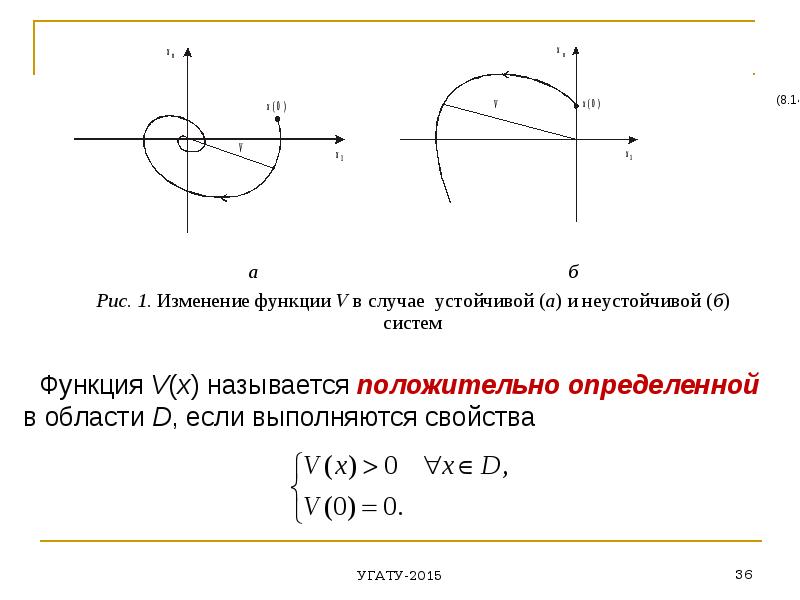
- 34. исследуется изменение «расстояния» в пространстве состояний от текущей точки системы до
- 35. Суть второго метода Ляпунова сводится к оценке изменения некоторой функции координат
- 38. Теоремы второго метода Ляпунова Теоремы второго метода Ляпунова Состояние равновесия системы
- 39. Теорема о неустойчивости Теорема о неустойчивости Состояние равновесия системы
- 40. Пример Пример с помощью второго метода Ляпунова оценить устойчивость
- 41. Выберем для нее в качестве функции Ляпунова следующую функцию: Выберем для
- 42. полная производная новой функции Ляпунова есть отрицательно определенная функция. Следовательно,
- 43. Скачать презентацию







, пройдя через линейную часть")



 и q'(a) – коэффициенты")
 коэффициент q'(a)=0.
Для однозначной нелинейной")












 определяет собой прямую линию на плоскости")








Слайды и текст этой презентации
Слайд 1
Описание слайда:
Нелинейные системы автоматического управления
Нелинейной системой автоматического управления называется такая система, которая содержит хотя бы одно звено описываемое нелинейным уравнением
Слайд 2
Описание слайда:
Виды нелинейных звеньев:
Виды нелинейных звеньев:
звенья релейного типа
идеальное реле
реле с гистерезисом
Слайд 3
Описание слайда:
идеальное реле с зоной нечувствительности
идеальное реле с зоной нечувствительности
реальное реле с зоной нечувствительности
Слайд 4
Описание слайда:
звено с кусочно-линейной характеристикой
звено с кусочно-линейной характеристикой
усилитель с ограничением
усилитель с зоной нечувствительности
Слайд 5
Описание слайда:
звено с криволинейной характеристикой
звено с криволинейной характеристикой
звено, уравнение которого содержит произведение переменных или их производных
логическое звено
Слайд 6
Описание слайда:
Метод гармонической линеаризации
относится к приближенным методам
прост и универсален
широко распространен в инженерной практике
Слайд 7
Описание слайда:
Идея метода гармонической линеаризации. Условия применимости
Идея метода гармонической линеаризации. Условия применимости
Предполагается
в системе автоколебания с амплитудой ak и частотой ωk.
Сигнал на входе НЗ
Сигнал на выходе НЗ
Слайд 8
Описание слайда:
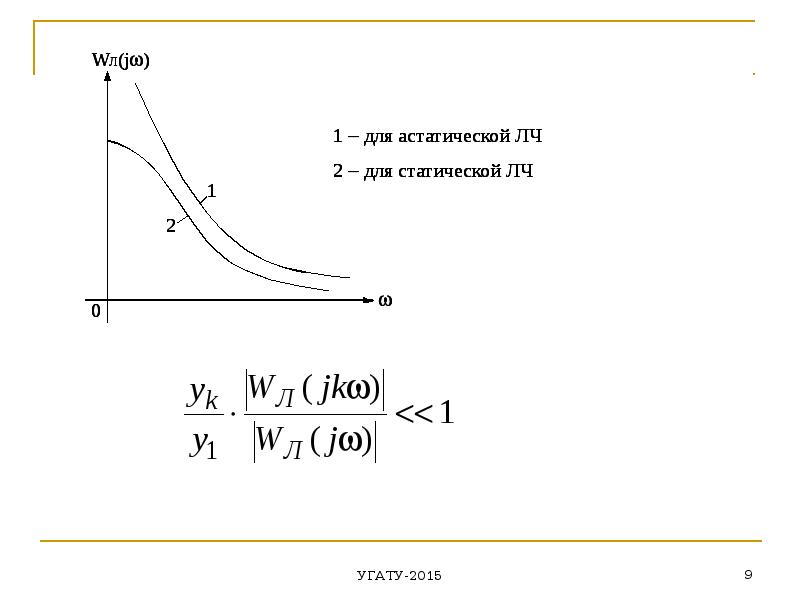
предполагается,
предполагается,
что сигнал y(t), пройдя через линейную часть WЛ(jω), фильтруется ею в такой степени, что в сигнале на x(t) на выходе линейной части можно пренебречь высшими гармониками x2(t), x3(t)…и считать, что
Это предположение называется гипотезой фильтра.
Слайд 9
Описание слайда:
Слайд 10
Описание слайда:
- уравнение баланса амплитуд
- уравнение баланса амплитуд
- уравнение баланса фаз
гармонических колебаний
уравнения гармонического баланса
Слайд 11
Описание слайда:
Решаются две группы задач:
исследование периодических движений в нелинейных замкнутых системах (определение условий устойчивости и параметров ПД);
исследование условий отсутствия моногармонических автоколебаний в нелинейных замкнутых системах.
Слайд 12
Описание слайда:
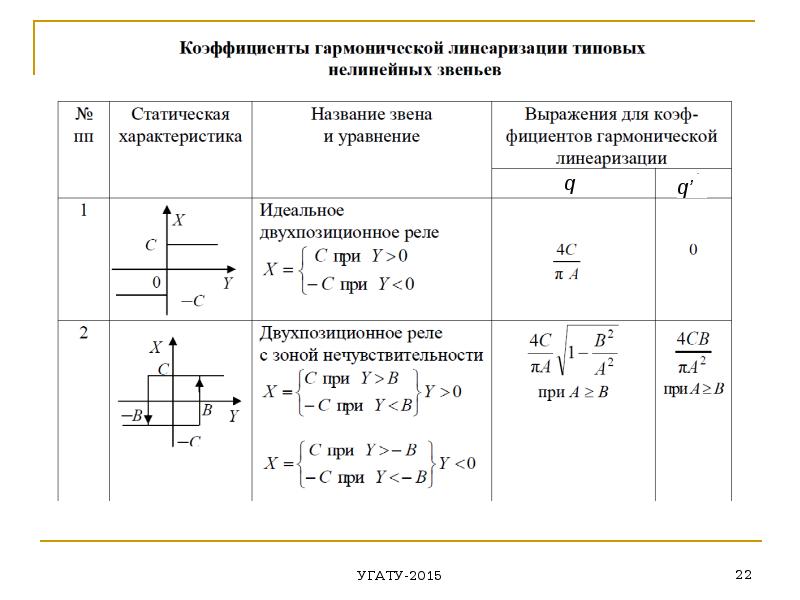
Гармоническая линеаризация нелинейностей
Пусть заданная нелинейная функция
При выполнении гипотезы фильтра переменная x(t) asint sin.
Разложим периодический сигнал на выходе НЗ в ряд Фурье:
Слайд 13
Описание слайда:
Предполагаем
где p=d/dt
где q(a) и q'(a) – коэффициенты гармонической линеаризации
Слайд 14
Описание слайда:
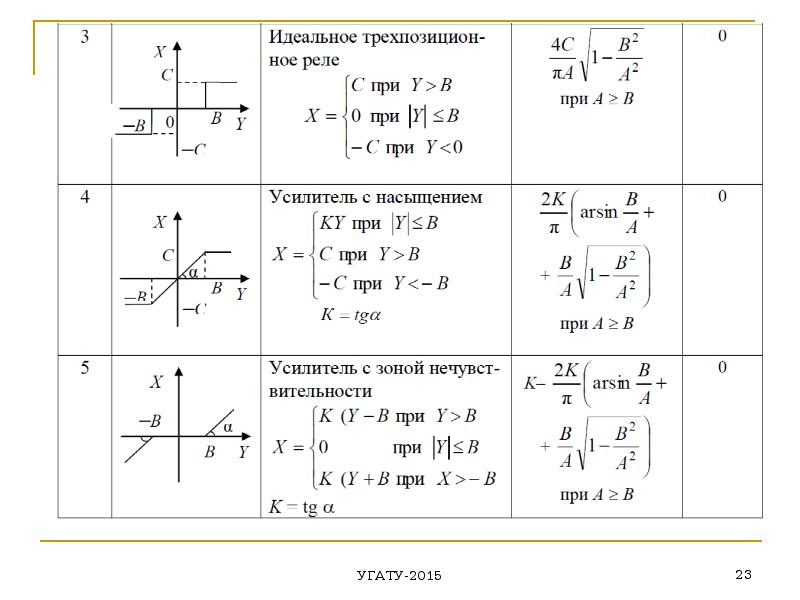
Для однозначной нелинейной характеристики F(x) коэффициент q'(a)=0.
Для однозначной нелинейной характеристики F(x) коэффициент q'(a)=0.
Для неоднозначной характеристики типа гистерезис q'(a)≠0 и q'(a)<0
Слайд 15
Описание слайда:
Замена исходного нелинейного уравнения приближенным уравнением для первой гармоники называется гармонической линеаризацией
Замена исходного нелинейного уравнения приближенным уравнением для первой гармоники называется гармонической линеаризацией
передаточной функцией нелинейного гармонически линеаризованного звена
Слайд 16
Описание слайда:
Исследование устойчивости периодических движений методом гармонической линеаризации
Запишем уравнение замкнутой гармонически линеаризованной нелинейной САУ в операторной форме:
- передаточная функция линейной
части, n[R(s)] m[Q(s)]
Слайд 17
Описание слайда:
Характеристическое уравнение гармонически линеаризованной нелинейной САУ:
Характеристическое уравнение гармонически линеаризованной нелинейной САУ:
подставим в L(s) s=jωп
выделим вещественную U(aп,ωп,) и мнимую V(aп,ωп) части.
по критерию Михайлова
Слайд 18
Описание слайда:
определяются параметры ПД aп и ωп.
определяются параметры ПД aп и ωп.
Слайд 19
Описание слайда:
Если при положительном приращении амплитуды ∆a>0 кривая Михайлова займет положение 1-1, а при отрицательном приращении амплитуды ∆a<0 займет положение 2-2, то исследуемые ПД с параметрами (aп,ωп) устойчивы, т.е. в НС имеют место автоколебания. В противном случае ПД – неустойчивы, а сама нелинейная САУ устойчива в малом.
Если при положительном приращении амплитуды ∆a>0 кривая Михайлова займет положение 1-1, а при отрицательном приращении амплитуды ∆a<0 займет положение 2-2, то исследуемые ПД с параметрами (aп,ωп) устойчивы, т.е. в НС имеют место автоколебания. В противном случае ПД – неустойчивы, а сама нелинейная САУ устойчива в малом.
Слайд 20
Описание слайда:
Частотный метод исследования устойчивости ПД в НС
Л. С. Голдфарба (1946 г.)
Основная идея
WН(a) комплексный коэффициент передачи НЭ
Слайд 21
Описание слайда:
s=jω
s=jω
решим полученное уравнение относительно неизвестных aп и ωп .
Графоаналитическое решение
- инверсный коэффициент гармонической линеаризации
Слайд 22
Описание слайда:
Слайд 23
Описание слайда:
Слайд 24
Описание слайда:
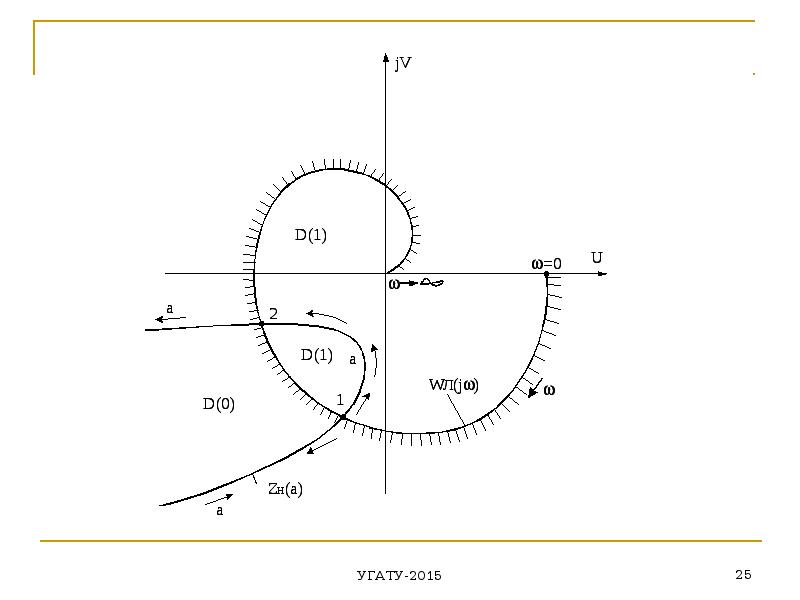
Оба годографа и строятся на одной комплексной плоскости.
Оба годографа и строятся на одной комплексной плоскости.
- АФХ линейной части определяет частоту ωп ПД,
- амплитуду aп ПД.
ПД – устойчивы, если, двигаясь по характеристике в сторону возрастания амплитуды, переходим из неустойчивой в устойчивую область D-разбиения при устойчивой линейной части .
Слайд 25
Описание слайда:
Слайд 26
Описание слайда:
Слайд 27
Описание слайда:
Критерий абсолютной устойчивости В. М. Попова
Слайд 28
Описание слайда:
линейная часть системы устойчива
линейная часть системы устойчива
Абсолютная устойчивость нелинейной САУ предложена в 1959 г. в работе румынского математика В. М. Попова.
Слайд 29
Описание слайда:
Теорема. Если замкнутая система состоит из устойчивой линейной части с передаточной функцией, все полюсы которой располагаются в левой полуплоскости, и нелинейного элемента с характеристикой , лежащей в угле
Теорема. Если замкнутая система состоит из устойчивой линейной части с передаточной функцией, все полюсы которой располагаются в левой полуплоскости, и нелинейного элемента с характеристикой , лежащей в угле
, то достаточным условием этой системы является выполнение при всех
неравенства
(1)
где q – произвольное вещественное число
Слайд 30
Описание слайда:
Геометрическая интерпретация теоремы.
Геометрическая интерпретация теоремы.
введем видоизмененную частотную характеристику
обозначим
(2)
(3)
(4)
Слайд 31
Описание слайда:
(4) определяет собой прямую линию на плоскости , которая проходит через точку с координатами
(4) определяет собой прямую линию на плоскости , которая проходит через точку с координатами
с угловым коэффициентом, равным .
Теорема. САУ будет абсолютно устойчива, если на плоскости видоизмененной частотной характеристики линейной части системы можно провести прямую через точку так, чтобы располагалась справа от этой прямой. Указанную прямую принято называть прямой Попова.
Слайд 32
Описание слайда:
Слайд 33
Описание слайда:
Второй метод Ляпунова
не требует нахождения решения дифференциального уравнения
основная идея
замена анализа решений нелинейных уравнений произвольного порядка на оценку свойств этих решений с помощью дифференциального неравенства
Слайд 34
Описание слайда:
исследуется изменение «расстояния» в пространстве состояний от текущей точки системы до начала координат
исследуется изменение «расстояния» в пространстве состояний от текущей точки системы до начала координат
В качестве оценки расстояния можно использовать скалярную функцию, которую обозначим через V(x)
фазовые траектории системы
устойчивое состояние равновесия -«стягиваются»
Слайд 35
Описание слайда:
Суть второго метода Ляпунова сводится к оценке изменения некоторой функции координат состояния системы вдоль траекторий движения
Суть второго метода Ляпунова сводится к оценке изменения некоторой функции координат состояния системы вдоль траекторий движения
V(x) - называют функцией Ляпунова.
Слайд 36
Описание слайда:
Слайд 37
Описание слайда:
Слайд 38
Описание слайда:
Теоремы второго метода Ляпунова
Теоремы второго метода Ляпунова
Состояние равновесия системы является асимптотически устойчивым, если для положительно определенной функции Ляпунова V(x) ее полная производная в силу системы есть отрицательно определенная функция, т. е. при выполнении условий
Слайд 39
Описание слайда:
Теорема о неустойчивости
Теорема о неустойчивости
Состояние равновесия системы является неустойчивым, если для положительно определенной функции Ляпунова V(x) ее полная производная в силу системы представляет собой также положительно определенную функцию.
теоремы дают только достаточные условия устойчивости и неустойчивости
Слайд 40
Описание слайда:
Пример
Пример
с помощью второго метода Ляпунова оценить устойчивость системы, поведение которой описывают следующие уравнения:
Полагаем u = 0 и рассмотрим автономную систему
Слайд 41
Описание слайда:
Выберем для нее в качестве функции Ляпунова следующую функцию:
Выберем для нее в качестве функции Ляпунова следующую функцию:
Определим теперь полную производную функции Ляпунова вдоль траектории движения автономной системы
обращается в нуль не только в начале координат, но и на всей оси .
Слайд 42
Описание слайда:
полная производная новой функции Ляпунова есть отрицательно определенная функция.
Следовательно, исходная система является асимптотически устойчивой.
Скачать презентацию на тему Нелинейные системы автоматического управления можно ниже: