Методи розв’язування СЛАР (Система лінійних алгебраїчних рівнянь) презентация
Содержание
- 2. МЕТОДИ РОЗВ’ЯЗУВАННЯ СЛАР
- 4. ПРЯМІ МЕТОДИ РОЗВ’ЯЗУВАННЯ СЛАР МЕТОД ГАУССА
- 5. МЕТОД ГАУССА
- 6. МЕТОД ГАУССА
- 7. МЕТОД ГАУССА Метод Гаусса має сигнальну функцію виду (поліноміальний): Елемент
- 8. Матрицею перестановок P називається квадратна матриця, у якої в кожному рядку
- 9. З системи Ax = b маємо Cx = y З системи
- 10. Метод Гаусса відповідає розкладанню матриці A на добуток двох трикутних матриць:
- 11. LU-розкладання матриці А
- 12. Приклад
- 13. Схема Холецького
- 14. Обчислення det(A) на основі LU-розкладу матриці Обчислення det(A) на основі LU-розкладу
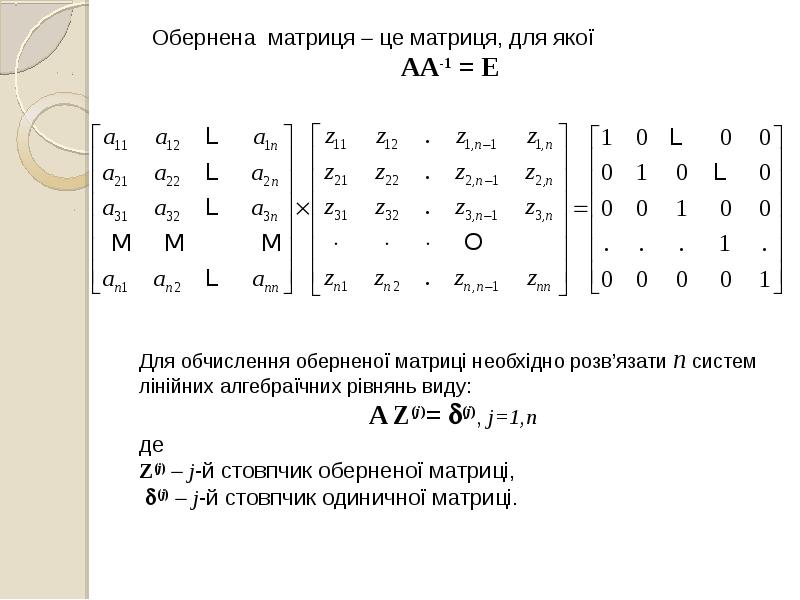
- 16. Обчислення A-1 Знаючи розклад обернену
- 17. РОЗВ’ЯЗУВАННЯ ПЕРЕВИЗНАЧЕНИХ СИСТЕМ РІВНЯНЬ Припустимо, що система Ax = b має
- 18. ТОЧНІСТЬ РОЗВ’ЯЗКУ СЛАР 6,1 x 1 + 3,4 x 2 =
- 20. Норми векторів Норма lp ||x||p = (|x1|p + |x2|p +…+|xn|p)1/p
- 21. Норми матриць Норма lp Евклидова норма Норма
- 22. ВЛАСТИВОСТІ НОРМ
- 23. ЧИСЛО ОБУМОВЛЕНОСТІ
- 24. ЧИСЛО ОБУМОВЛЕНОСТІ
- 25. ОЦІНКА ПОХИБОК
- 26. ТОЧНІСТЬ РОЗВ’ЯЗКУ СЛАР 6,1 x 1 + 3,4 x 2 =
- 27. Скачать презентацию





:
Елемент")






 на основі LU-розкладу матриці
Обчислення det(A) на основі LU-розкладу")



1/p")






Слайды и текст этой презентации
Слайд 1
Описание слайда:
МЕТОДИ РОЗВ’ЯЗУВАННЯ СЛАР
Слайд 2
Описание слайда:
МЕТОДИ РОЗВ’ЯЗУВАННЯ СЛАР
Слайд 3
Описание слайда:
Слайд 4
Описание слайда:
ПРЯМІ МЕТОДИ РОЗВ’ЯЗУВАННЯ СЛАР
МЕТОД ГАУССА
Слайд 5
Описание слайда:
МЕТОД ГАУССА
Слайд 6
Описание слайда:
МЕТОД ГАУССА
Слайд 7
Описание слайда:
МЕТОД ГАУССА
Метод Гаусса має сигнальну функцію виду (поліноміальний):
Елемент називається ведучим елементом на k-му кроці виключення. Основним обмеженням методу є припущення, що всі елементи відмінні від нуля. Щоб зменшити похибку ведучим необхідно вибирати найбільшим за модулем елемент.
Слайд 8
Описание слайда:
Матрицею перестановок P називається квадратна матриця, у якої в кожному рядку і в кожному стовпці наявний лише один відмінний від нуля і рівний одиниці елемент.
Елементарною матрицею перестановок Pki називається матриця, отримана з одиничної матриці перестановкою k-го
і i-го рядків. Наприклад, елементарними матрицями перестановок третього порядку є матриці:
Добуток двох (а отже, і будь-якої кількості) елементарних матриць перестановок є матрицею перестановок (не обов’язково елементарною).
Матрицю PkiA отримують із матриці A перестановкою k-го і i-го рядків.
Матрицю APki отримують із матриці A перестановкою k-го і i-го стовпців.
Метод Гаусса з вибором головного елемента по стовпцю еквівалентний звичайному методу Гаусса, який застосовують до системи
Слайд 9
Описание слайда:
З системи Ax = b маємо Cx = y
З системи Ax = b маємо Cx = y
Можна показати b та y пов’язані між собою як
Dy = b, де матриця D має вигляд:
З y = D-1b
Маємо Cx = D-1b DCx = b A = DC
Слайд 10
Описание слайда:
Метод Гаусса відповідає розкладанню матриці A на добуток двох трикутних матриць:
Метод Гаусса відповідає розкладанню матриці A на добуток двох трикутних матриць:
A = LU (L = D, U = C)
тобто
Якщо det A ≠ 0, то існує матриця перестановок P така, що справедливе розкладання
Слайд 11
Описание слайда:
LU-розкладання матриці А
Слайд 12
Описание слайда:
Приклад
Слайд 13
Описание слайда:
Схема Холецького
Слайд 14
Описание слайда:
Обчислення det(A) на основі LU-розкладу матриці
Обчислення det(A) на основі LU-розкладу матриці
det(A)= det(LU)= det(L) det(U) =
Розв’язування СЛАР на основі LU-розкладу матриці
Розкладання матриці A = LU
Розв’язування системи Ly = b
Розв’язування системи Ux = y
Слайд 15
Описание слайда:
Слайд 16
Описание слайда:
Обчислення A-1
Знаючи розклад обернену матрицю легко обчислити як
Слайд 17
Описание слайда:
РОЗВ’ЯЗУВАННЯ ПЕРЕВИЗНАЧЕНИХ СИСТЕМ РІВНЯНЬ
Припустимо, що система
Ax = b
має матрицю A розмірністю m n (m > n).
Така система має безліч розв’язків, але можна вибрати серед них таке, що мінімізує нев’язку розв’язку = b – Ax.
Початкова перевизначена система зводиться до так званої нормальної форми
(ATA)x = Cx = ATb
Звідки
x = (ATA)-1ATb
Матриця С = ATA розмірністю (n n) неособлива,
якщо стовпці матриці A незалежні.
Слайд 18
Описание слайда:
ТОЧНІСТЬ РОЗВ’ЯЗКУ СЛАР
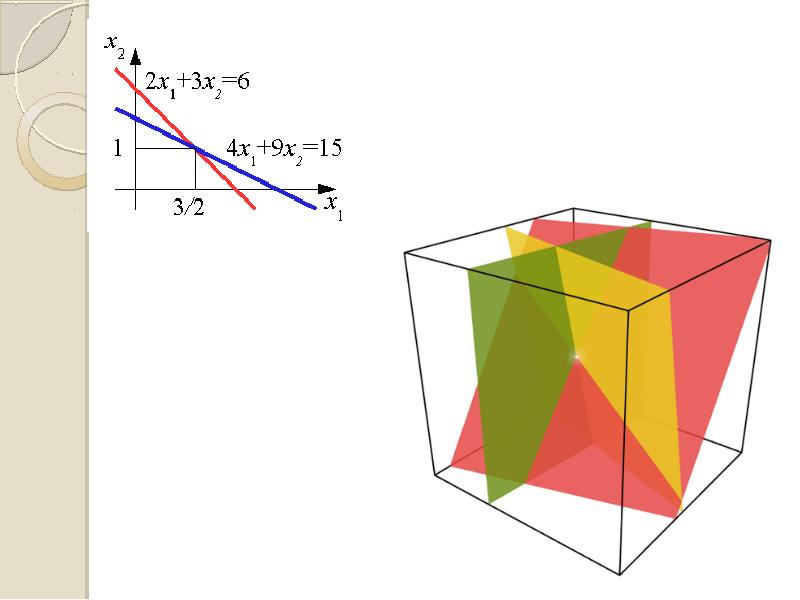
6,1 x 1 + 3,4 x 2 = 6,1
14,7 x 1 + 8,2 x 2 = 14,7
x 1= 1; x 2 = 0.
6,1 x 1 + 3,4 x 2 = 6,101
14,7 x 1 + 8,2 x 2 = 14,7
x 1= 1,205; x 2 = -0,3675.
6,101 x 1 + 3,4 x 2 = 6,1
14,7 x 1 + 8,2 x 2 = 14,7
x 1= 0,829875; x 2 = 0,304979.
Слайд 19
Описание слайда:
Слайд 20
Описание слайда:
Норми векторів
Норма lp
||x||p = (|x1|p + |x2|p +…+|xn|p)1/p
Евклидова норма
||x||2 = (|x1|2 + |x2|2 +…+|xn|2)1/2
Норма l1
||x||1 = (|x1| + |x2| +…+|xn|)
Норма l
||x|| = max {|x1|,|x2|,…,|xn|)
i
Слайд 21
Описание слайда:
Норми матриць
Норма lp
Евклидова норма
Норма l1
Норма l
Слайд 22
Описание слайда:
ВЛАСТИВОСТІ НОРМ
Слайд 23
Описание слайда:
ЧИСЛО ОБУМОВЛЕНОСТІ
Слайд 24
Описание слайда:
ЧИСЛО ОБУМОВЛЕНОСТІ
Слайд 25
Описание слайда:
ОЦІНКА ПОХИБОК
Слайд 26
Описание слайда:
ТОЧНІСТЬ РОЗВ’ЯЗКУ СЛАР
6,1 x 1 + 3,4 x 2 = 6,1
14,7 x 1 + 8,2 x 2 = 14,7
x 1= 1; x 2 = 0.
6,1 x 1 + 3,4 x 2 = 6,101
14,7 x 1 + 8,2 x 2 = 14,7
x1= 1,205; x 2 = -0,3675.
6,101 x 1 + 3,4 x 2 = 6,1
14,7 x 1 + 8,2 x 2 = 14,7
x 1= 0,829875; x 2 = 0,304979.
cond(A)=1.1908*104 |A| = 0.04
Скачать презентацию на тему Методи розв’язування СЛАР (Система лінійних алгебраїчних рівнянь) можно ниже: