Основи побудови радіоелектронної техніки. Загальні відомості про РЛС 19Ж6. (Тема 10.1) презентация
Содержание
- 3. МЕТА ЗАНЯТТЯ: НАВЧАЛЬНА МЕТА: 1. Вивчити загальні поняття про РЛС 19Ж6.
- 4. НАВЧАЛЬНІ ПИТАННЯ: НАВЧАЛЬНІ ПИТАННЯ: I. Вступна частина.........................................10 хв. II. Основна
- 5. ЛІТЕРАТУРА ОСНОВИ ПОБУДОВИ РЛС РТВ ПІД РЕДАКЦІЄЮ Б.Ф. БОНДАРЕНКО, КВІРТУ
- 6. ПИТАННЯ І РОЛЬ І МІСЦЕ РЛС 19 Ж6 СЕРЕД РАДІОЕЛЕКТРОННОЇ
- 7. РЛС 19Ж6 при роботі у складі АСУ старого парку (“ЛУЧ-2”, “Воздух-1М”)
- 8. При спряженні РЛС 19Ж6 з АСУ “ПІРАМІДА” (КЗА 86Ж6) на АСУ
- 9. Визначення державної власності об‘єктів проводиться за допомогою вмонтованого наземного радіозапитувача (НРЗ)
- 10. РЛС видає на автоматизовані ПУ рлр оброблені сигнали відлуння, сигнали відповіді
- 11. ПИТАННЯ ІІ ПРИЗНАЧЕННЯ, СКЛАД І РОЗМІЩЕННЯ РЛС 19Ж6 НА
- 12. Пересувна трикоординатна РЛС 19Ж6 (СТ-68У) призначена для виявлення, пізнавання, визначення координат
- 15. - відображення скорочених та повних формулярів цілей, що несуть у собі
- 17. При спряженні РЛС 19Ж6 з АСУ “ПІРАМІДА” (КЗА 86Ж6) на АСУ
- 21. Кабельне господарство дозволяє встановити агрегатний причеп 6БП на відстані не більше
- 28. Зона виявлення у горизонтальній площині створюється шляхом кругового обертання антенної системи,
- 36. Якість радіолокаційної інформації Якість радіолокаційної інформації Усереднені по всій зоні огляду
- 38. Інформаційна здатність Інформаційна здатність Інформаційна здатність РЛС оцінюється максимальною кількістю цілей,
- 40. ПИТАННЯ ІІІ БОЙОВІ МОЖЛИВОСТІ РЛС 19Ж6
- 41. Під бойовими можливостями розуміють сукупність визначених кількісних і якісних показників, які
- 42. ЗОНОЮ ОГЛЯДУ РЛС (ЗО) називається область простору, в межах якої цілі
- 43. Форма і розміри ЗО РЛС характеризуються: Форма і розміри ЗО РЛС
- 45. В азимутальній (горизонтальній) площині ЗО РЛС утворюється шляхом кругового обертання антенної
- 46. Для РЛС 19Ж6 ЗО в кутомірній площині утворюється шляхом вибору одного
- 47. ДН антени РЛС 19Ж6 в горизонтальній площині складає 20 по рівню
- 48. ЯКІСТЬ РЛІ Якість рлі характеризується помилками визначення координат цілей та пеленгів
- 49. ІНФОРМАЦІЙНА МОЖЛИВІСТЬ ІНФОРМАЦІЙНА МОЖЛИВІСТЬ Інформаційна можливість РЛС - максимальна кількість
- 50. ПЕРЕШКОДОЗАХИЩЕННІСТЬ ПЕРЕШКОДОЗАХИЩЕННІСТЬ Перешкодозахищенність - це властивість РЛС виконувати свої задачі з
- 51. Захист від активних шумових перешкод (АШП) досягається: Захист від активних шумових
- 52. ЗГЛ - використовується поляризаційні розбіжності корисних і перешкодових сигналів. Коефіцієнт придушення
- 53. ЗАХИСТ від імпульсних перешкод відповіді (ІПВ), які діють по боковим пелюсткам
- 54. ЗАХИСТ ВІД ПАСИВНИХ ЗАВАД досягається: ЗАХИСТ ВІД ПАСИВНИХ ЗАВАД досягається: -
- 55. - застосуванням компенсації місцевих предметів і часової АРП; - застосуванням компенсації
- 56. МОБІЛЬНІСТЬ МОБІЛЬНІСТЬ Мобільність РЛС визначається можливістю перебазування її на нову позицію,
- 57. НАДІЙНІСТЬ ТА ЖИВУЧІСТЬ НАДІЙНІСТЬ ТА ЖИВУЧІСТЬ НАДІЙНІСТЬ РЛС - це властивість
- 58. Інструкція з заходів безпеки та електробезпеки при експлуатації радіолокаційної станції 19Ж6
- 74. ПИТАННЯ ІV ОСНОВНІ ТЕХНІЧНІ ХАРАКТЕРИСТИКИ РЛС 19Ж6
- 80. До основних технічних рішень відносяться: До основних технічних рішень відносяться: 1.
- 81. Скачать презентацию




")
 на АСУ")
")


 призначена для виявлення, пізнавання, визначення координат")

 на АСУ")







 називається область простору, в межах якої цілі")

 площині ЗО РЛС утворюється шляхом кругового обертання антенної")





 досягається:
Захист від активних шумових")

, які діють по боковим пелюсткам")







Слайды и текст этой презентации
Слайд 1
Описание слайда:
Слайд 2
Описание слайда:
Слайд 3
Описание слайда:
МЕТА ЗАНЯТТЯ:
НАВЧАЛЬНА МЕТА:
1. Вивчити загальні поняття про РЛС 19Ж6.
ВИХОВНА МЕТА:
1. Виховувати у студентів культуру поведінки.
2. Виховувати студентів у дусі патріотизму.
Слайд 4
Описание слайда:
НАВЧАЛЬНІ ПИТАННЯ:
НАВЧАЛЬНІ ПИТАННЯ:
I. Вступна частина.........................................10 хв.
II. Основна частина.......................................145 хв.
1. Роль і місце РЛС 19Ж6 серед радіоелектронної техніки.
2. Призначення, склад і розміщення РЛС 19Ж6 на позиції.
3. Бойові можливості РЛС 19Ж6.
4. Основні технічні характеристики РЛС 19Ж6.
III. Заключна частина....................................5 хв.
Слайд 5
Описание слайда:
ЛІТЕРАТУРА
ОСНОВИ ПОБУДОВИ РЛС РТВ
ПІД РЕДАКЦІЄЮ Б.Ф. БОНДАРЕНКО, КВІРТУ ППО, 1987.
2. ОСНОВИ ПОБУДОВИ РАДІОЕЛЕКТРОННОЇ ТЕХНІКИ РАДІОТЕХНІЧНИХ ВІЙСЬК ППО, 1989.
3. ТХОРЖЕВСЬКИЙ В.І. СИСТЕМИ РАДІОЛОКАЦІЙНОГО РОЗПІЗНАВАННЯ. НАВЧАЛЬНИЙ ПОСІБНИК. ЧАСТИНА 1. КИЇВ, 2007 РІК.
4.ТЕОРІЯ РАДІОЛОКАЦІЙНИХ СИСТЕМ:
ПІДРУЧНИК / Б.Ф. БОНДАРЕНКО, В.В. ВИШНІВСЬКИЙ, В. П. ДОЛГУШИН ТА ІНШІ; ЗА ЗАГАЛЬНОЮ РЕДАКЦІЄЮ С.В. ЛЄНКОВА, 2008.
Слайд 6
Описание слайда:
ПИТАННЯ І
РОЛЬ І МІСЦЕ РЛС 19 Ж6 СЕРЕД РАДІОЕЛЕКТРОННОЇ ТЕХНІКИ
Слайд 7
Описание слайда:
РЛС 19Ж6 при роботі у складі АСУ старого парку (“ЛУЧ-2”, “Воздух-1М”) видає на автоматизований КП РЛР первинну РЛІ (сигнали відлуння та сигнали пізнавання) в аналоговому вигляді. Висота видається або голосом, або в аналоговому вигляді з потенціометричного датчику, що знаходится на робочому місці оператора.
РЛС 19Ж6 при роботі у складі АСУ старого парку (“ЛУЧ-2”, “Воздух-1М”) видає на автоматизований КП РЛР первинну РЛІ (сигнали відлуння та сигнали пізнавання) в аналоговому вигляді. Висота видається або голосом, або в аналоговому вигляді з потенціометричного датчику, що знаходится на робочому місці оператора.
Слайд 8
Описание слайда:
При спряженні РЛС 19Ж6 з АСУ “ПІРАМІДА” (КЗА 86Ж6) на АСУ видається первинна РЛІ для оцінки повітряної обстановки і координати цілей в цифровому вигляді та додаткова інформація,
При спряженні РЛС 19Ж6 з АСУ “ПІРАМІДА” (КЗА 86Ж6) на АСУ видається первинна РЛІ для оцінки повітряної обстановки і координати цілей в цифровому вигляді та додаткова інформація,
що заноситься в пам’ять спецобчислювача
для вирішення завдань екстраполяції та обчислення параметрів руху цілей.
При автономній роботі в неавтоматизованих підрозділах інформація зчитується оператором у лінію зв’язку голосом з екрану індикатора.
Слайд 9
Описание слайда:
Визначення державної власності об‘єктів проводиться за допомогою вмонтованого наземного радіозапитувача (НРЗ) малої потужності НРЗ-6Л (1Л24).
Визначення державної власності об‘єктів проводиться за допомогою вмонтованого наземного радіозапитувача (НРЗ) малої потужності НРЗ-6Л (1Л24).
РЛС 19Ж6 призначена для використання:
- при сполученні з КЗА 86Ж6;
- при сполученні з виробом ПУ 5У69;
з АСК «Воздух-1М» у складі ВП-01М,
ВП-02М;
- в неавтоматизованих підрозділах;
- під час автономної роботи.
Слайд 10
Описание слайда:
РЛС видає на автоматизовані ПУ рлр оброблені сигнали відлуння, сигнали відповіді і службові сигнали, які забезпечують відображення на екранах КЗА РЛІ. Інформація про висоту цілей може видаватись з РЛС голосом, або в аналоговому вигляді з спеціального
РЛС видає на автоматизовані ПУ рлр оброблені сигнали відлуння, сигнали відповіді і службові сигнали, які забезпечують відображення на екранах КЗА РЛІ. Інформація про висоту цілей може видаватись з РЛС голосом, або в аналоговому вигляді з спеціального
датчика. При сполученні РЛС 19Ж6 з 6Ж6, “Піраміда”, “Луч-4” інформація про цілі видається з РЛС автоматично в аналоговому і цифровому вигляді.
Слайд 11
Описание слайда:
ПИТАННЯ ІІ
ПРИЗНАЧЕННЯ,
СКЛАД І РОЗМІЩЕННЯ РЛС 19Ж6 НА ПОЗИЦІЇ
Слайд 12
Описание слайда:
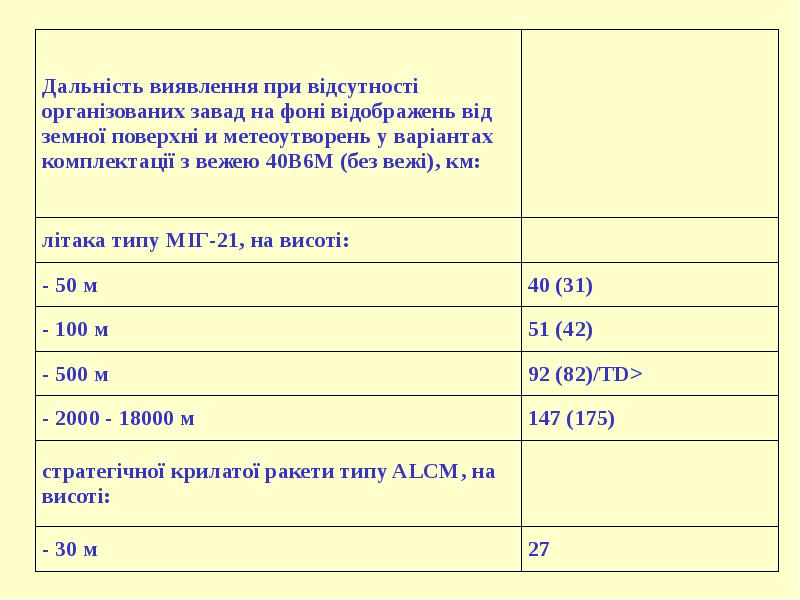
Пересувна трикоординатна РЛС 19Ж6 (СТ-68У) призначена для виявлення, пізнавання, визначення координат маловисотних цілей (в тому числі і малорозмірних) в умовах активних та пасивних завад на фоні інтенсивних відбитків від земної поверхні, а також для пеленгації постановників активних перешкод.
Пересувна трикоординатна РЛС 19Ж6 (СТ-68У) призначена для виявлення, пізнавання, визначення координат маловисотних цілей (в тому числі і малорозмірних) в умовах активних та пасивних завад на фоні інтенсивних відбитків від земної поверхні, а також для пеленгації постановників активних перешкод.
РЛС 19Ж6 випускається двох літер, які відрізняються використанням різних несучих частот в зондувальному сигналі:
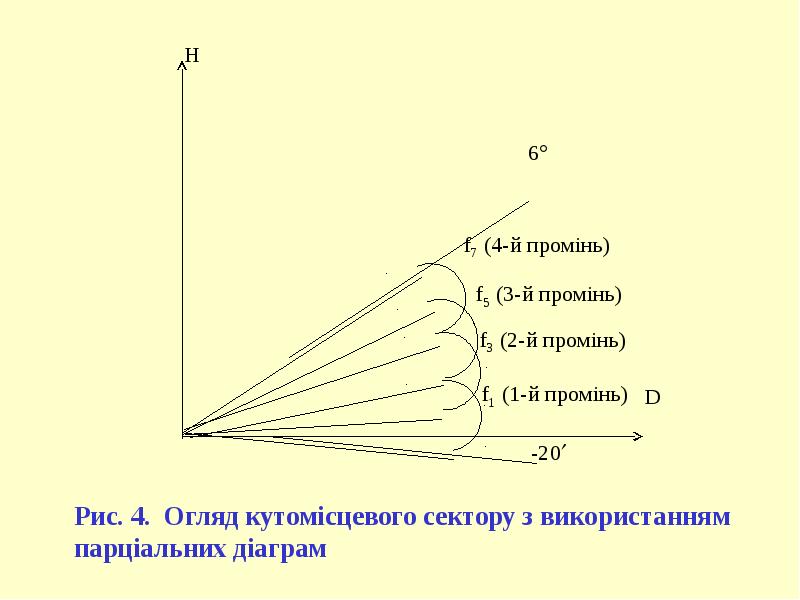
В РЛС19Ж6 використовується сигнал с частотами f1, f3, f5 та f7.
В РЛС19Ж6 -1 використовується сигнал с частотами f2, f4, f6 та f8.
Слайд 13
Описание слайда:
Слайд 14
Описание слайда:
Слайд 15
Описание слайда:
- відображення скорочених та повних формулярів цілей, що несуть у собі інформацію про координати цілей, які необхідні для оцінки повітряної обстановки та зчитування інформації споживачам в режимі ручної роботи;
- відображення скорочених та повних формулярів цілей, що несуть у собі інформацію про координати цілей, які необхідні для оцінки повітряної обстановки та зчитування інформації споживачам в режимі ручної роботи;
- дистанційне управління режимами роботи РЛС за командами, що надходять з апаратури АСУ або ВІКО;
- видачу первинної та вторинної інформації на спряжені елементи у вигляді, зручному для споживачів;
- ведення об’єктивного контролю інформації, що видається.
Слайд 16
Описание слайда:
Слайд 17
Описание слайда:
При спряженні РЛС 19Ж6 з АСУ “ПІРАМІДА” (КЗА 86Ж6) на АСУ видається первинна РЛІ для оцінки повітряної обстановки і координати цілей в цифровому вигляді та додаткова інформація, що заноситься в пам’ять спецобчислювача для вирішення завдань екстраполяції та обчислення параметрів руху цілей.
При спряженні РЛС 19Ж6 з АСУ “ПІРАМІДА” (КЗА 86Ж6) на АСУ видається первинна РЛІ для оцінки повітряної обстановки і координати цілей в цифровому вигляді та додаткова інформація, що заноситься в пам’ять спецобчислювача для вирішення завдань екстраполяції та обчислення параметрів руху цілей.
При автономній роботі в неавтоматизованих підрозділах інформація зчитується оператором у лінію зв’язку голосом з екрану індикатора.
Слайд 18
Описание слайда:
Слайд 19
Описание слайда:
Слайд 20
Описание слайда:
Слайд 21
Описание слайда:
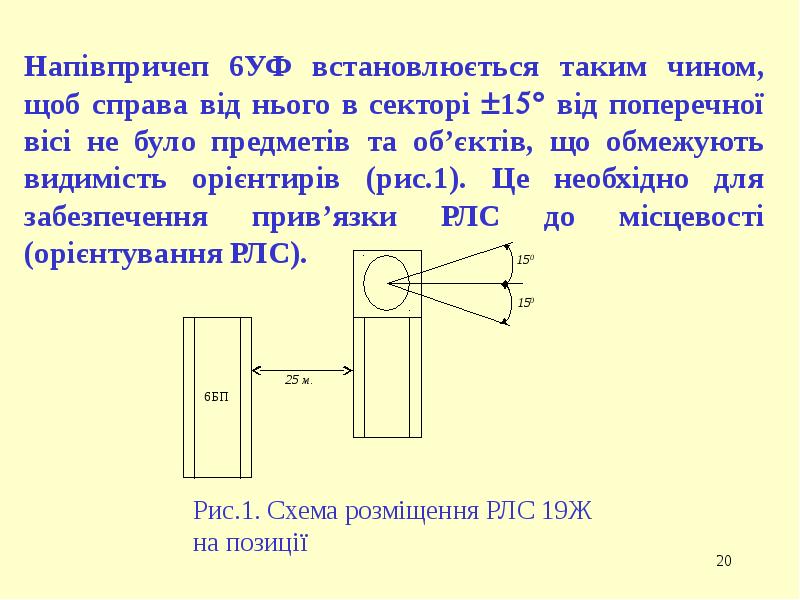
Кабельне господарство дозволяє встановити агрегатний причеп 6БП на відстані не більше 25 м від апаратного та встановлювати ВІКО на ПУ РЛР на відстані до 300 м (для забезпечення живучості обслуговуючого персоналу).
Кабельне господарство дозволяє встановити агрегатний причеп 6БП на відстані не більше 25 м від апаратного та встановлювати ВІКО на ПУ РЛР на відстані до 300 м (для забезпечення живучості обслуговуючого персоналу).
Позиція РЛС 19Ж6 вибирається за умов найкращого огляду простору у відповідальному оперативному секторі за азимутом та кутом місця.
На позиції РЛС 19Ж6 в межах ближньої зони на дальності до 400 м не повинно бути таких перешкод, як ліс, лінії електромережі та інших споруд.
Слайд 22
Описание слайда:
Слайд 23
Описание слайда:
Слайд 24
Описание слайда:
Слайд 25
Описание слайда:
Слайд 26
Описание слайда:
Слайд 27
Описание слайда:
Слайд 28
Описание слайда:
Зона виявлення у горизонтальній площині створюється шляхом кругового обертання антенної системи, що встановлена на лафеті напівпричепа 6УФ, зі швидкістю 6 об/хв або 12 об/хв. Швидкість 6 об/хв використовується для більш впевненого виявлення цілей на максимальних дальностях при веденні радіолокаційної розвідки, а також при сильному повітрі. Швидкість 12 об/хв забезпечує підвищення темпу оновлення інформації по цілям у 2 рази, що дуже важливо при видачі інформації вогневим засобам.
Зона виявлення у горизонтальній площині створюється шляхом кругового обертання антенної системи, що встановлена на лафеті напівпричепа 6УФ, зі швидкістю 6 об/хв або 12 об/хв. Швидкість 6 об/хв використовується для більш впевненого виявлення цілей на максимальних дальностях при веденні радіолокаційної розвідки, а також при сильному повітрі. Швидкість 12 об/хв забезпечує підвищення темпу оновлення інформації по цілям у 2 рази, що дуже важливо при видачі інформації вогневим засобам.
Слайд 29
Описание слайда:
Слайд 30
Описание слайда:
Слайд 31
Описание слайда:
Слайд 32
Описание слайда:
Слайд 33
Описание слайда:
Слайд 34
Описание слайда:
Слайд 35
Описание слайда:
Слайд 36
Описание слайда:
Якість радіолокаційної інформації
Якість радіолокаційної інформації
Усереднені по всій зоні огляду середньоквадратичні значення похибок визначення координат літака типу МИГ-21 в умовах відсутності перешкод, на дальностях до 70 км не перевищують:
по дальності D 250 м;
по азимуту 20;
по висоті Н 400 м (в нижній зоні);
Похибки визначення пеленгів на постановник АШП не перевищують:
по азимуту 40;
по куту місця ε 1 (в нижній зоні);
Слайд 37
Описание слайда:
Слайд 38
Описание слайда:
Інформаційна здатність
Інформаційна здатність
Інформаційна здатність РЛС оцінюється максимальною кількістю цілей, що реально видаються в одиницю часу (як правило за 1 хв), з заданою дискретністю.
При автономній роботі (без АСУ) та ручному зйомі інформації з ІКО, кількість цілей, що видаються за одну хвилину буде залежати від:
кількості індикаторів (робочих місць);
встановленої дискретності видачі інформації;
рівня підготовки операторів.
Згідно з нормативами бойової роботи підготовлений оператор повинен видавати не менше 10 цілей за хвилину з одного робочого місця.
Слайд 39
Описание слайда:
Слайд 40
Описание слайда:
ПИТАННЯ ІІІ
БОЙОВІ МОЖЛИВОСТІ
РЛС 19Ж6
Слайд 41
Описание слайда:
Під бойовими можливостями розуміють сукупність визначених кількісних і якісних показників, які характеризують можливість РЛС виконати поставлені тактичні задачі з заданою якістю.
Під бойовими можливостями розуміють сукупність визначених кількісних і якісних показників, які характеризують можливість РЛС виконати поставлені тактичні задачі з заданою якістю.
Бойові можливості РЛС оцінюються:
- характеристикою зони огляду;
- захищеністю від перешкод;
- якістю рл- інформації;
- інформаційною можливістю;
- мобільністю;
- надійністю РЛС.
Слайд 42
Описание слайда:
ЗОНОЮ ОГЛЯДУ РЛС (ЗО) називається область простору, в межах якої цілі виявляються з заданою імовірністю і виконується їх проведення (супроводжування) з потрібною точністю.
ЗОНОЮ ОГЛЯДУ РЛС (ЗО) називається область простору, в межах якої цілі виявляються з заданою імовірністю і виконується їх проведення (супроводжування) з потрібною точністю.
Форма і розміри ЗО РЛС залежать від:
- режиму огляду простору;
- режиму роботи і параметрів апаратури;
- позиції, на якій розгорнута РЛС;
- ефективної відбиваючої поверхні цілі.
Слайд 43
Описание слайда:
Форма і розміри ЗО РЛС характеризуються:
Форма і розміри ЗО РЛС характеризуються:
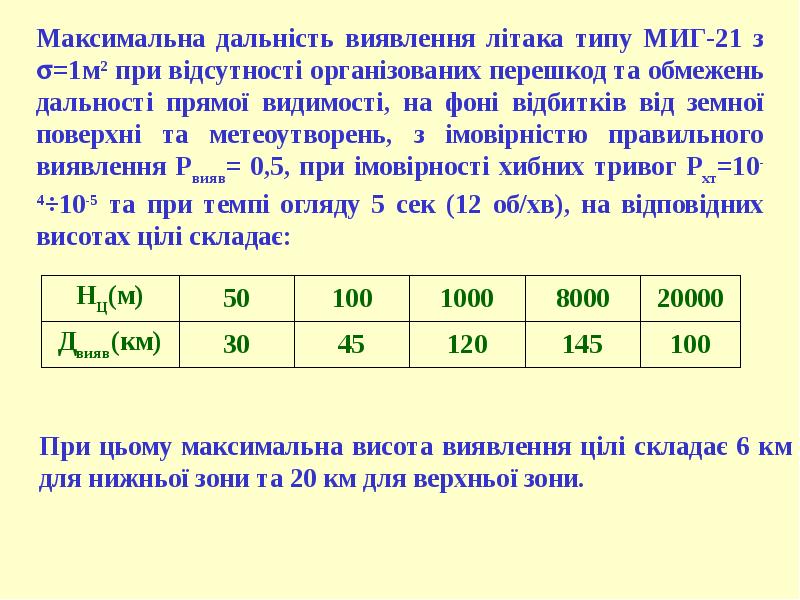
графіком або таблицею залежності Дmax виявлення від висоти прольоту цілі Дmax = f(H);
- кутовими розмірами ЗО в азимутальній площині;
- кутовими розмірами ЗО в кутомірній площині;
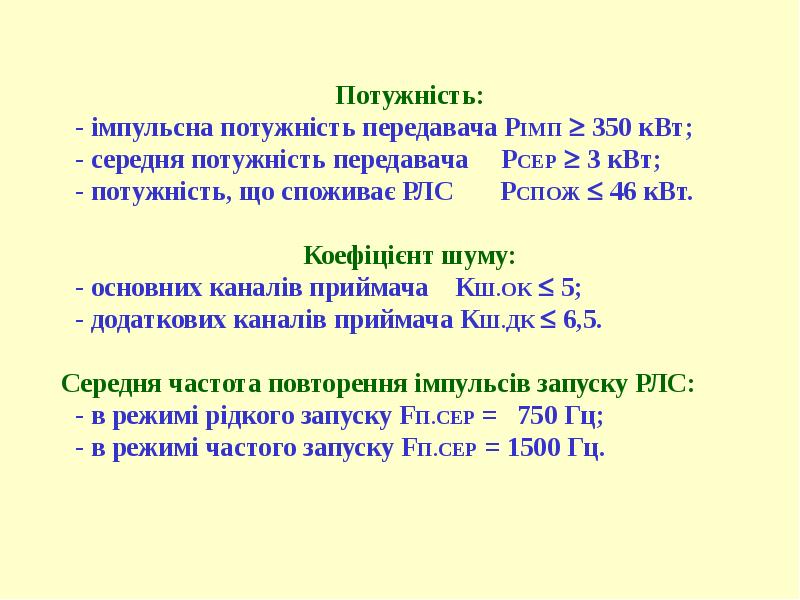
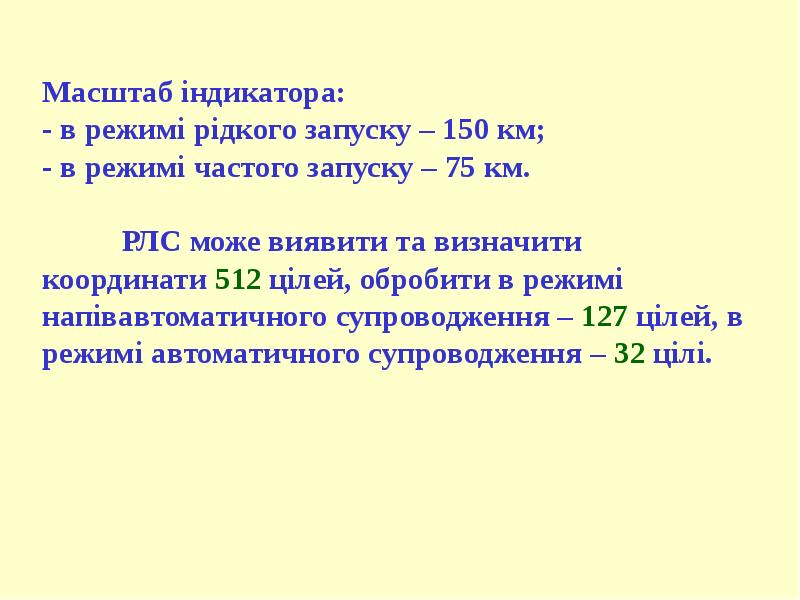
Для РЛС 19Ж6 Дмах обмежена можливостями апаратури обробки інформації і складає в режимі рідкого запуску - 150 км, частого запуску - 75 км.
Слайд 44
Описание слайда:
Слайд 45
Описание слайда:
В азимутальній (горизонтальній) площині ЗО РЛС утворюється шляхом кругового обертання антенної системи з швидкістю обертання 6 і 12 об/хв. і складає 360 градусів.
В азимутальній (горизонтальній) площині ЗО РЛС утворюється шляхом кругового обертання антенної системи з швидкістю обертання 6 і 12 об/хв. і складає 360 градусів.
6 об/хв. використовується при сильному вітрі, при дії інтенсивних активних і пасивних перешкод.
12 об/хв. використовується при проведенні швидкісних цілей (для підвищення темпу видачі інформації)в нескладній перешкодовій обстановці.
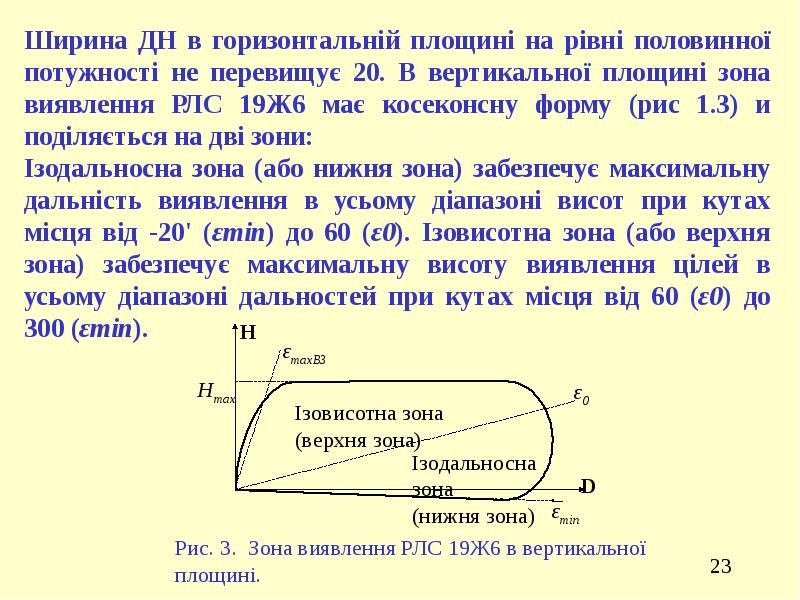
В кутомірній (вертикальній) площині ЗО РЛС, як правило, вибирають такою, щоб для кутів місця , які лежать в межах min < < o забезпечувалась максимальна дальність виявлення (ізодальністна зона), а для кутів більше о - максимальна висота виявлення (ізовисотна зона).
Слайд 46
Описание слайда:
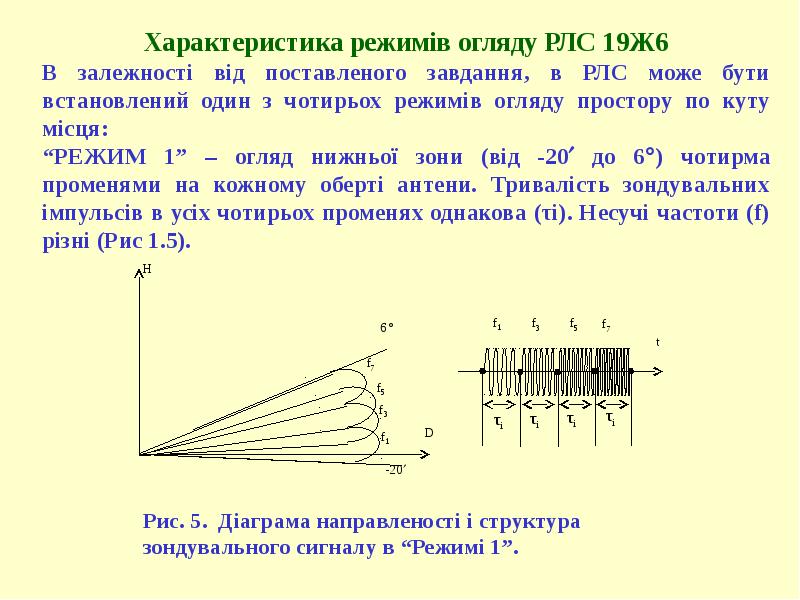
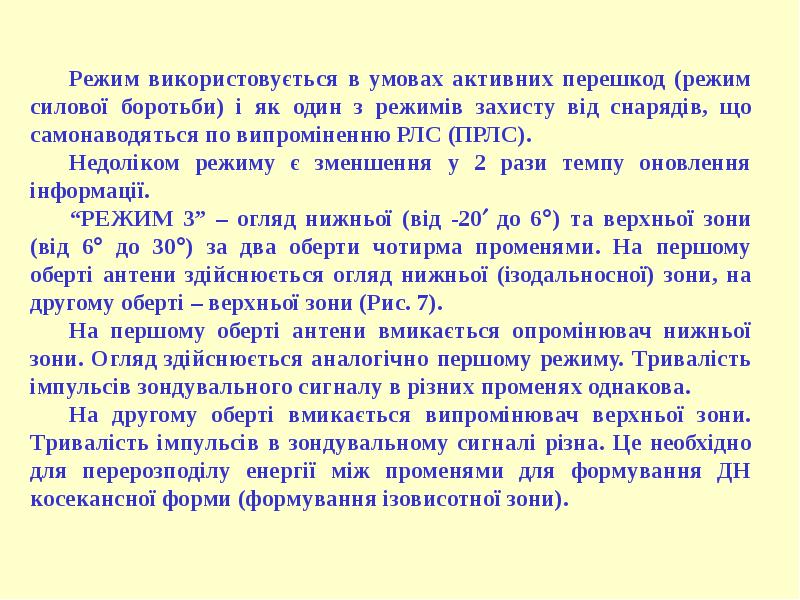
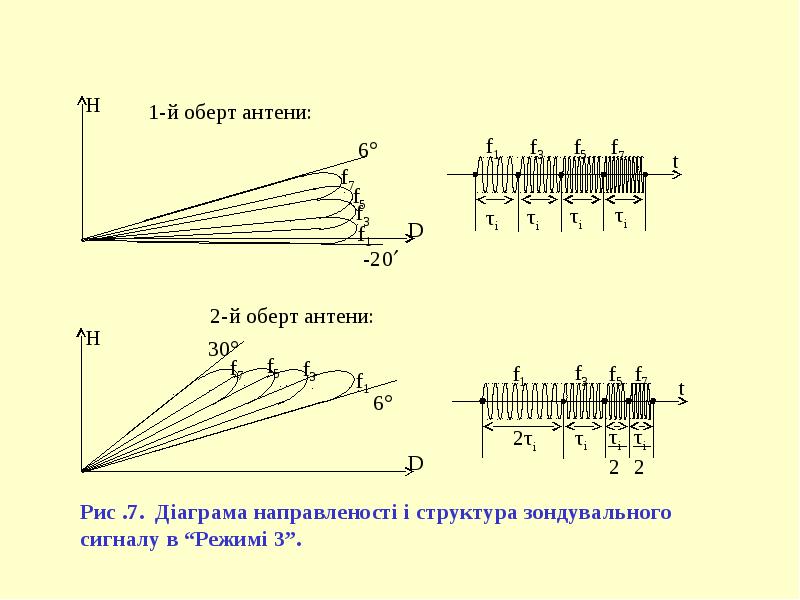
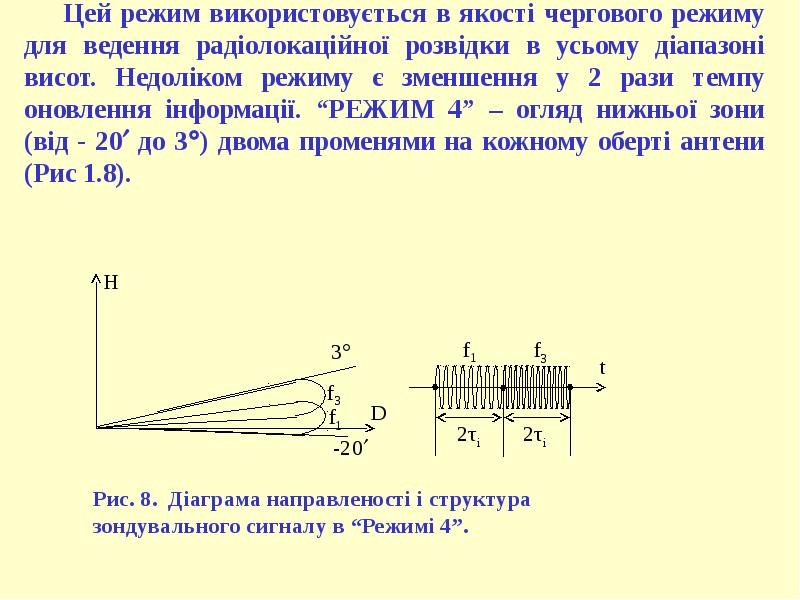
Для РЛС 19Ж6 ЗО в кутомірній площині утворюється шляхом вибору одного із 4-х режимів:
Для РЛС 19Ж6 ЗО в кутомірній площині утворюється шляхом вибору одного із 4-х режимів:
Слайд 47
Описание слайда:
ДН антени РЛС 19Ж6 в горизонтальній площині складає 20 по рівню 0,5 Рмах.
ДН антени РЛС 19Ж6 в горизонтальній площині складає 20 по рівню 0,5 Рмах.
Відносний рівень перших бокових пелюсток ДН 1...4 променів
НЗ = -25 дБ
ВЗ = -20 дБ
Слайд 48
Описание слайда:
ЯКІСТЬ РЛІ
Якість рлі характеризується помилками визначення координат цілей та пеленгів і розрізнюючими можливостями РЛС по кожній координаті.
Середнє квадратичне значення помилок визначення координат в умовах відсутності перешкод на дальності 70 км не перевищує:
Д < 250 м; < 20‘; H < 400 м (НЗ).
Середнє квадратичне значення помилок визначення пеленгів не перевищує:
< 40‘ ; < 10 (НЗ) < 60 (ВЗ)
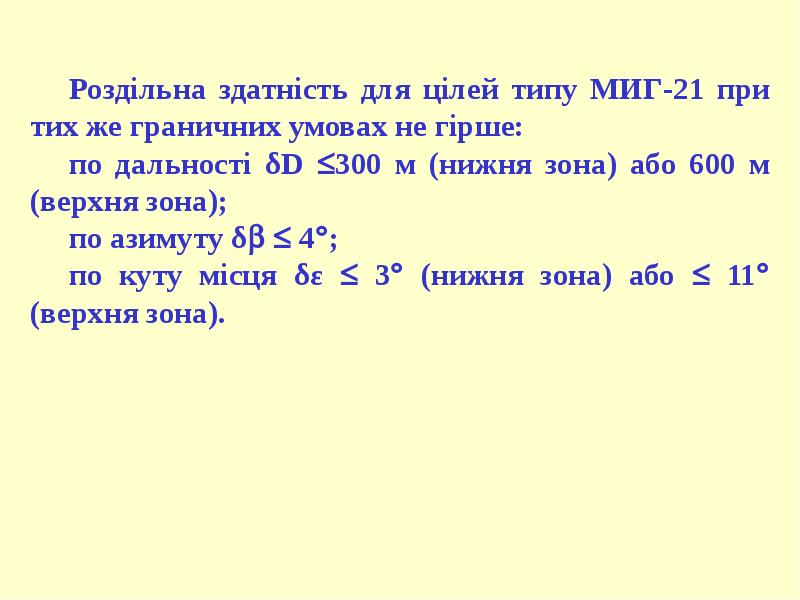
Розрізнюючі можливості при цих же умовах не гірше:
Д < 300 м; < 30 (НЗ)
< 40
Д < 600 м; < 110 (ВЗ)
Слайд 49
Описание слайда:
ІНФОРМАЦІЙНА МОЖЛИВІСТЬ
ІНФОРМАЦІЙНА МОЖЛИВІСТЬ
Інформаційна можливість РЛС - максимальна кількість цілей, по яким РЛС може видавати інформацію заданої якості при встановленій дискретності (періоду обновлення) і оцінюється числом цілей, інформація про які реально видається в одиницю часу з заданою дискретністю.
При ручному видаванню рлі без КЗА забезпечується видача з ІКО або ВІКО по 10 цілей за хвилину. Максимальний темп видачі даних при 6 об/хв - 10 с,а при 12 об/хв. - 5 с.
При сполучені з КЗА інформаційна можливість РЛС визначається можливостями цих систем.
В РЛС 19Ж6 пам‘ять спецобчислювача може мати інформацію про 512 цілей.
Слайд 50
Описание слайда:
ПЕРЕШКОДОЗАХИЩЕННІСТЬ
ПЕРЕШКОДОЗАХИЩЕННІСТЬ
Перешкодозахищенність - це властивість РЛС виконувати свої задачі з допустимим зниженням якості в умовах перешкод.
Вона характеризується коефіцієнтом придушення перешкод різного виду.
В РЛС 19Ж6 є захист від наступних видів перешкод:
1. Активних шумових перешкод (АШП).
2. Імпульсних перешкод відповіді (ІПВ) при дії їх по боковим пелюсткам ДН антени.
3. Несинхронних імпульсних перешкод (НІП).
4. Нестаціонарних активних перешкод (НАП).
5. Пасивних перешкод (місцевих предметів, дипольних відбивачів, хмар іт.п.).
Слайд 51
Описание слайда:
Захист від активних шумових перешкод (АШП) досягається:
Захист від активних шумових перешкод (АШП) досягається:
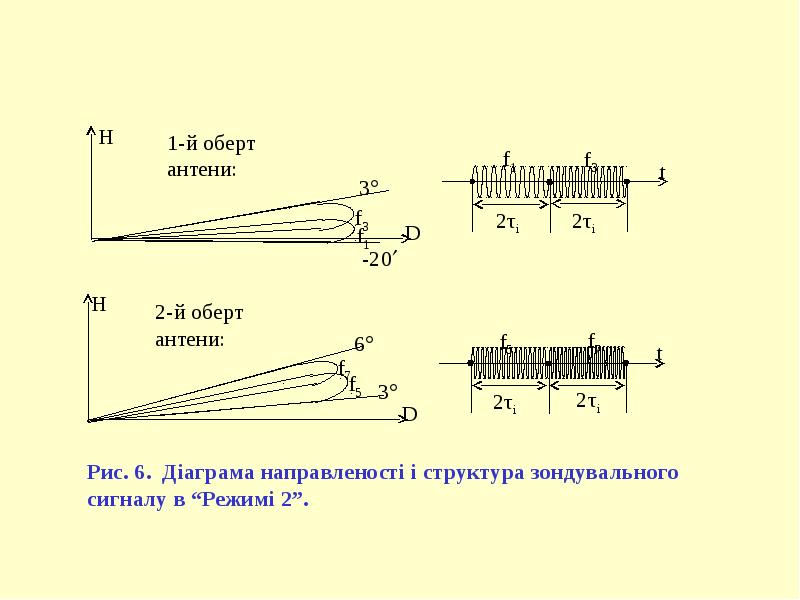
а) Силовою боротьбою з постановниками АШП (режим 2 і 4 ). При цьому забезпечується концентрація енергії випромінювання в двох променях і відповідне підвищення дальності виявлення в межах (20‘ .. 60 ).
К прд АШП = 23 дБ.
б) Багатоканальністю РЛС і рознесенням частот в каналах. Це реалізовано у всіх режимах роботи. Завдяки цьому досягається частотна селективність по куту місця і підвищення перешкодостійкості до АШП.
в) Застосуванням апаратури автокомпенсації АШП. Реалізується включенням режиму ЗГЛ (захист головної пелюстки), КБЛ (компенсація бокових пелюсток).
Слайд 52
Описание слайда:
ЗГЛ - використовується поляризаційні розбіжності корисних і перешкодових сигналів. Коефіцієнт придушення перешкоди по головній пелюстці становить КЗГЛ = 20дБ.
ЗГЛ - використовується поляризаційні розбіжності корисних і перешкодових сигналів. Коефіцієнт придушення перешкоди по головній пелюстці становить КЗГЛ = 20дБ.
КБЛ - використовуються розбіжності в напрямках прийому корисних і перешкодових сигналів. Коефіцієнт придушення перешкоди ККБЛ = 19 дб.
При використанні в РЛС антени з частотним скануванням не можна перестроювати частоту з метою захисту від АЗ. Для підвищення перешкодозахищеності і електромагнітної сумісності угрупування РЛС є можливість працювати на 2 частотних літерах з відповідним розподілом їх між РЛС сусідніх підрозділів.
г) пеленгацією постановників перешкод АШП.
д) когерентним накопиченням сигналу (пачка по 8 імпульсів).
е) великим динамічним діапазоном приймача.
Слайд 53
Описание слайда:
ЗАХИСТ від імпульсних перешкод відповіді (ІПВ), які діють по боковим пелюсткам досягається застосуванням пристрою формування бланків придушення бокової відповіді ПБВ, які забороняють обробку сигналів на час дії ІПВ. Захист проводиться при включенні режиму ПБВ.
ЗАХИСТ від імпульсних перешкод відповіді (ІПВ), які діють по боковим пелюсткам досягається застосуванням пристрою формування бланків придушення бокової відповіді ПБВ, які забороняють обробку сигналів на час дії ІПВ. Захист проводиться при включенні режиму ПБВ.
ЗАХИСТ від несинхронних імпульсних перешкод (НИП) виконується при міжперіодній логічній обробці сигналів по критерію к/n (k із n). Захист проводиться автоматично у всіх режимах роботи РЛС.
ЗАХИСТ від нестаціонарних активних перешкод (НАП) виконується за допомогою схеми ШОУ з одночасним включенням схеми АРУ в широкосмуговому тракті приймача (режим ШОУ- АРУ тобто широкосмугове підсилення - обмеження вузькосмугове підсилення). Захист проводиться при включені режиму НАП.
Слайд 54
Описание слайда:
ЗАХИСТ ВІД ПАСИВНИХ ЗАВАД досягається:
ЗАХИСТ ВІД ПАСИВНИХ ЗАВАД досягається:
- за рахунок високої розподільної можливості по всім координатам і швидкості(вона забезпечується за рахунок застосування когерентної послідовності зондувального імпульсу);
- лінійності обробки сигналів в приймальному тракті і застосуванням системи когерентного накопичення імпульсів пачки.
Система накопичення має 8 допплерівських фільтрів. В результаті накопичення виконується розділення корисних сигналів і пасивних перешкод по різним допплерівським фільтрам.
Слайд 55
Описание слайда:
- застосуванням компенсації місцевих предметів і часової АРП;
- застосуванням компенсації місцевих предметів і часової АРП;
- великим динамічним діапазоном приймача;
- застосуванням пристрою стабілізації рівня хибних тривог;
- використанням цифрової СРЦ.
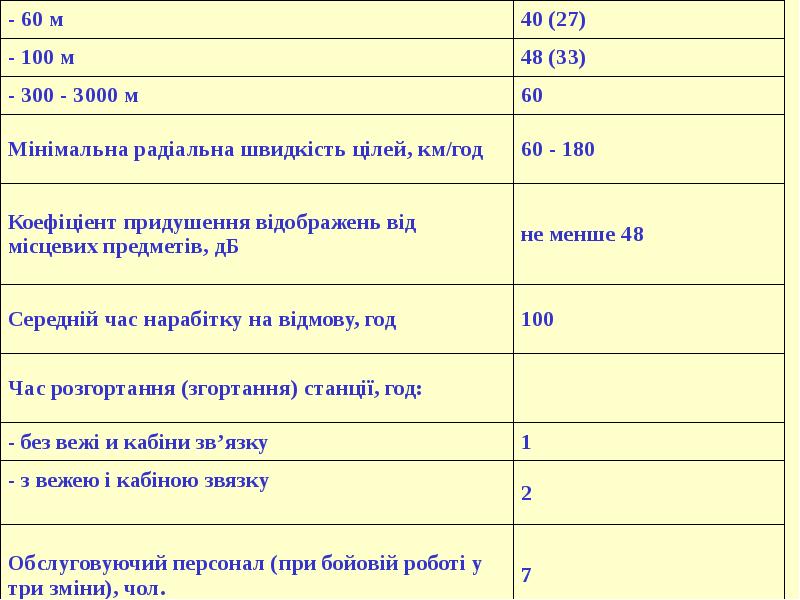
Коефіцієнт придушення системою накопичення відбиттів від місцевих предметів КМП = 48 дБ.
Коефіцієнт підперешкодової видимості КПВ = 40 - 44 дБ.
Слайд 56
Описание слайда:
МОБІЛЬНІСТЬ
МОБІЛЬНІСТЬ
Мобільність РЛС визначається можливістю перебазування її на нову позицію, умовами транспортування, строками розгортання і готовності до бойової роботи.
Мобільність характеризується:
часом згортання і розгортання РЛС розрахунком з 5 чоловік не більше 60 хвилин;
часом готовності РЛС до бойової роботи, який складається з:
а) часу включення РЛС:
нормальний режим 2хв.45с.
форсований режим 2 хв.
черговий режим 45 с.
Готовність агрегатів живлення - 30 с.
б) часу проведення контролю функціонування - 7 хв.
Максимальна швидкість транспортування РЛС за допомогою тягачів типу КРАЗ-255 - 50 км/год.
Можливо перевозити РЛС залізницею та повітряним транспортом (АН-22).
Слайд 57
Описание слайда:
НАДІЙНІСТЬ ТА ЖИВУЧІСТЬ
НАДІЙНІСТЬ ТА ЖИВУЧІСТЬ
НАДІЙНІСТЬ РЛС - це властивість виконувати і зберігати в часі задані функції в заданих режимах і умовах застосування, технічного обслуговування, ремонту, зберігання і транспортування..
Надійність та живучість характеризується:
1. Кліматичними умовами експлуатації
500 < t < + 500 ;
відносна вологість до 98% (при t = +35C0 );
швидкість вітру до 25 м/с.
2. Умовами експлуатації при дії факторів ядерного вибуху:
ударною хвилею з надлишковим тиском по фронту 0,15 кг/см2;
світловим випромінюванням 15 кал /см2 (t = 2c);
максимальною потужністю дози Y випромінювання 5*10 Р/c; електромагнітним імпульсом до 80 В/м.
3. Середнім часом напрацювання на відмову - 100 год.
4. Середнім часом відновлення 30 хв.
5. Можливістю захисту РЛС від ПРЛР.
Слайд 58
Описание слайда:
Інструкція з заходів безпеки та електробезпеки при експлуатації радіолокаційної станції 19Ж6
Слайд 59
Описание слайда:
Слайд 60
Описание слайда:
Слайд 61
Описание слайда:
Слайд 62
Описание слайда:
Слайд 63
Описание слайда:
Слайд 64
Описание слайда:
Слайд 65
Описание слайда:
Слайд 66
Описание слайда:
Слайд 67
Описание слайда:
Слайд 68
Описание слайда:
Слайд 69
Описание слайда:
Слайд 70
Описание слайда:
Слайд 71
Описание слайда:
Слайд 72
Описание слайда:
Слайд 73
Описание слайда:
Слайд 74
Описание слайда:
ПИТАННЯ ІV
ОСНОВНІ ТЕХНІЧНІ ХАРАКТЕРИСТИКИ
РЛС 19Ж6
Слайд 75
Описание слайда:
Слайд 76
Описание слайда:
Слайд 77
Описание слайда:
Слайд 78
Описание слайда:
Слайд 79
Описание слайда:
Слайд 80
Описание слайда:
До основних технічних рішень відносяться:
До основних технічних рішень відносяться:
1. Компактність конструкції і зручність експлуатації досягається одноканальною (по куту місця) побудовою потужного вихідного каскаду передавача, антенною і фідерною систем, розділенням багатоканальних пристроїв приймача і обробки сигналів на функціонально і конструктивно завершені системи (шафи).
2. Мобільність та малі габарити конструкції, які досягаються розміщенням всієї апаратури, враховуючи і НРЗ, і систему орієнтування в невеликих об‘ємах (в кабінах одного напівпричепу).
3. Високі ТТХ, які досягаються високим енергетичним потенціалом, сучасними системами обробки сигналів, захистом від активних і пасивних перешкод, первинної (виявлення сигналу, визначення поточних координат) і
вторинної (виявлення і супроводжування трас цілей) обробки, широким застосуванням цифрових пристроїв і цифрової обробки РЛ - сигналів.
Скачать презентацию на тему Основи побудови радіоелектронної техніки. Загальні відомості про РЛС 19Ж6. (Тема 10.1) можно ниже: