Виды контроля коррозии презентация
Содержание
- 3. Точки пересечения прямых Е-lg и E-lg для каждой из двух ОВР
- 4. В реальном коррозионном биэлектроде ( М в растворе, содержащем Мn+ ,
- 5. C учетом (8) и (9) переходит в (12), j ipM.
- 6. Если условия (12) и (13) не соблюдаются, потенциал под током не
- 7. В ы х о д п о т о к у
- 8. Если между катодным и анодным участками существует омическое падение напряжения. Графически
- 9. пересечения дает один Екор и максимальную скорость коррозии jмах. Для учета
- 11. Виды контроля коррозии При стационарном Екор растворение металла и катодная деполяризация
- 13. Рис. а,б иллюстрируют роль i0. Если , процесс протекает с катодным
- 14. На рис. в,г показана роль крутизны поляризационных кривых. При bк
- 15. Сложные коррозионные системы Короткозамкнутая система ( R0), у которой поверхность
- 16. Суммарные кривые E-Ja, E-Jк .
- 17. Кривая (
- 18. при М1 и М2 являются анодами, причем
- 19. Используя J вместо i , получаем Используя J
- 20. Парциальные кривые
- 21. Эти кривые идут от равновесного потенциала, а не от Екор. Аналогично
- 22. По данным рис. М1 – анод, М2 – слабый катод, а
- 23. Скачать презентацию



 и (9) переходит в (12), j ipM.")
 и (13) не соблюдаются, потенциал под током не")






, у которой")







Слайды и текст этой презентации
Слайд 1
Описание слайда:
Слайд 2
Описание слайда:
Слайд 3
Описание слайда:
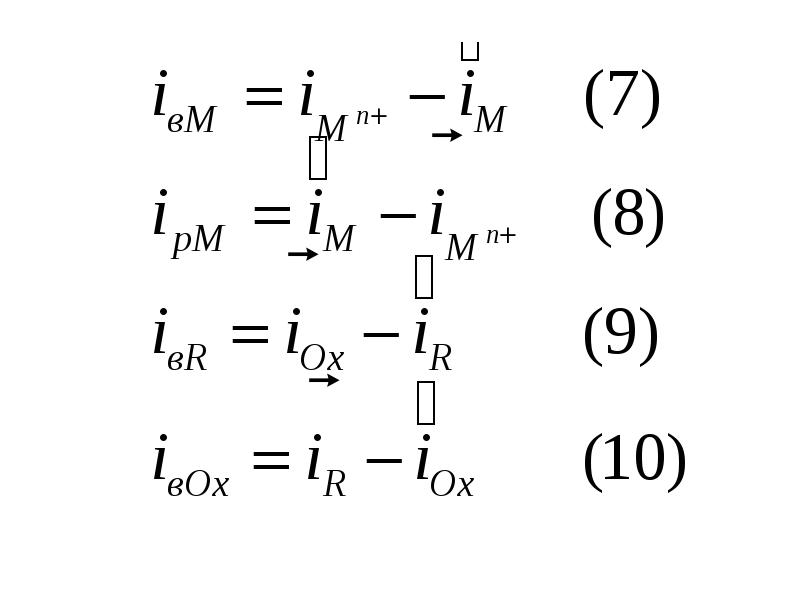
Точки пересечения прямых Е-lg и E-lg для каждой из двух ОВР (5) и (6) дают значения Ер и lgi обмена i0= = .
При рЕ с учетом (7)-(10) iвм= iрм=0 и iвR= iвOx=0. Суммарные ПК в координатах E-lgi имеют три участка:
- горизонтальный 0-1, когда i i0, электрод практически не поляризуется;
- кривая 1-2, когда при малой ΔЕ 2,3RT/(nF) значения i0, и соизмеримы,
- тафелева прямая 2-3 при большой поляризации, когда Мn+М и iвм Мn+ .
В Е-i участок 0-1 превращается в точку,
1-2 – в прямую и 2-3 – в эксп. зависимость.
Слайд 4
Описание слайда:
В реальном коррозионном биэлектроде ( М в растворе, содержащем Мn+ , Ох и R) рЕМn+/М и рЕОх/R измерить не удается, т.к. бестоковый потенциал является потенциалом коррозии Екор.
В реальном коррозионном биэлектроде ( М в растворе, содержащем Мn+ , Ох и R) рЕМn+/М и рЕОх/R измерить не удается, т.к. бестоковый потенциал является потенциалом коррозии Екор.
Условие с т а ц и о н а р н о с т и Екор имеет вид:
Слайд 5
Описание слайда:
C учетом (8) и (9) переходит в (12), j ipM.
C учетом (8) и (9) переходит в (12), j ipM.
j ipM = iвR (12)
Если ipM iвR нарушается электрический баланс и Екор становится нестационарным. Если ipM iвR Екор становится меньше стационарного, что приводит к снижению ipM и росту iвR во времени. В результате Екор увеличивается с и стремится к стационарному. Если первоначальный нестационарный бестоковый потенциал нужно сделать стационарным, для этого нужно выдержать условие iвR ipM, т.е подать на электрод катодный ток плотностью iк:
iк = iвR - ipM (13)
(13) - стационарность Е при катодной поляризации биэлектрода. При анодной поляризации оно имеет вид:
iа = ipM - iвR (14)
Слайд 6
Описание слайда:
Если условия (12) и (13) не соблюдаются, потенциал под током не стационарен. Кривые E-lg iк и E-lg iа представлены на рис и имеют те же три характерных участка. Поскольку при катодной поляризации ipM падает ( при каждом смещении потенциала на ΔЕк=ba на порядок), а iвR растет на порядок при каждом ΔЕк=bк, кривая плотности катодного тока практически сливается с прямыми E-lg iвR и E-lgOx. По этой же причине при ΔЕа bк (bа)
Если условия (12) и (13) не соблюдаются, потенциал под током не стационарен. Кривые E-lg iк и E-lg iа представлены на рис и имеют те же три характерных участка. Поскольку при катодной поляризации ipM падает ( при каждом смещении потенциала на ΔЕк=ba на порядок), а iвR растет на порядок при каждом ΔЕк=bк, кривая плотности катодного тока практически сливается с прямыми E-lg iвR и E-lgOx. По этой же причине при ΔЕа bк (bа)
iа ipM М. В этом случае кривые E-lg iвR и E-lg iрМ являются парциальными по отношению к суммарным E-lg iа и E-lg iк.
Слайд 7
Описание слайда:
В ы х о д п о т о к у
В ы х о д п о т о к у анодной реакции растворения металла представляет собой долю анодного тока, идущего на нее, или ВТрМ = iрМ/ iа. При Екор , когда iа= 0, ВТрМ = . В интервале Екор Е рЕОх/R с учетом (14) ВТрМ = 1+ iвR/ iа 1 снижается с ростом анодной поляризации. При Е= рЕ Мn+/М iвR=0 и ВТрМ=1. При Е рЕОх/R iа = iрМ + iвОх и
ВТрМ=1- iвОх/ iа1, но поскольку iвОх iрМ , ВТрМ1. Т.О., ВТрМ при анодной поляризации снижается. Аналогичным образом легко показать, что это же происходит и с ВТвR при катодной поляризации.
Слайд 8
Описание слайда:
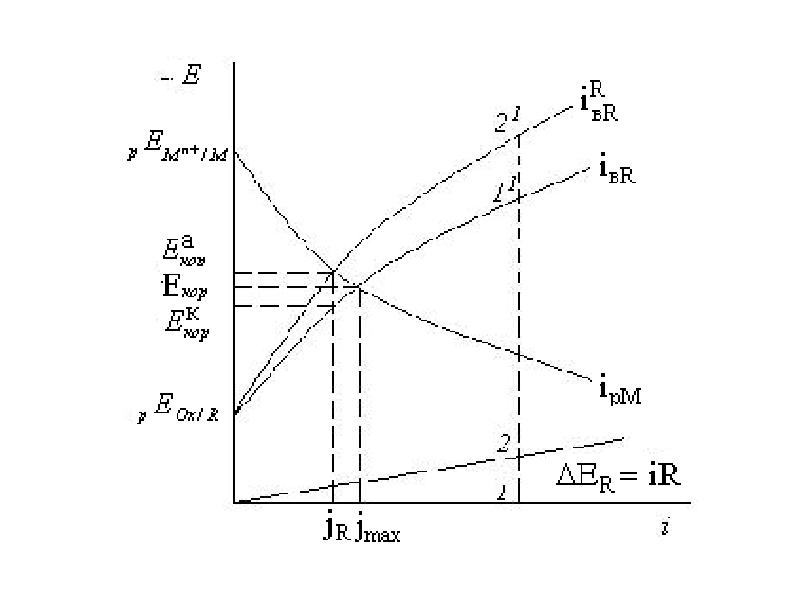
Если между катодным и анодным участками существует омическое падение напряжения. Графически уравнение закона Ома описывается прямой ΔЕR – i с угловым коэффициентом R. Поэтому поляризационные кривые представим в координатах Е – i и ограничимся наиболее важными для коррозионного биэлектрода Е – iрМ и Е –iвR (рис.2). Если они построены без учета омического фактора, тогда точка их
Если между катодным и анодным участками существует омическое падение напряжения. Графически уравнение закона Ома описывается прямой ΔЕR – i с угловым коэффициентом R. Поэтому поляризационные кривые представим в координатах Е – i и ограничимся наиболее важными для коррозионного биэлектрода Е – iрМ и Е –iвR (рис.2). Если они построены без учета омического фактора, тогда точка их
Слайд 9
Описание слайда:
пересечения дает один Екор и максимальную скорость коррозии jмах. Для учета омического фактора следует перестроить одну из кривых ( на рис.2 катодную), а именно при каждом i добавить отрезок, равный соответствующему ΔЕR ( отрезки 1-2 и 1`-2` равны).
пересечения дает один Екор и максимальную скорость коррозии jмах. Для учета омического фактора следует перестроить одну из кривых ( на рис.2 катодную), а именно при каждом i добавить отрезок, равный соответствующему ΔЕR ( отрезки 1-2 и 1`-2` равны).
Слайд 10
Описание слайда:
Слайд 11
Описание слайда:
Виды контроля коррозии
При стационарном Екор растворение металла и катодная деполяризация являются сопряженными реакциями, изменение скорости одной достаточно для изменения j. Однако величина j более чувствительна к изменению скорости более затрудненного процесса. Степень затрудненности процесса характеризуется перенапряжением =Екор-рЕ. при данной i растет с увеличением удельной поляризуемости b и уменьшением i0. Чем ниже b и выше i0, тем устойчивее рЕ.
Слайд 12
Описание слайда:
Слайд 13
Описание слайда:
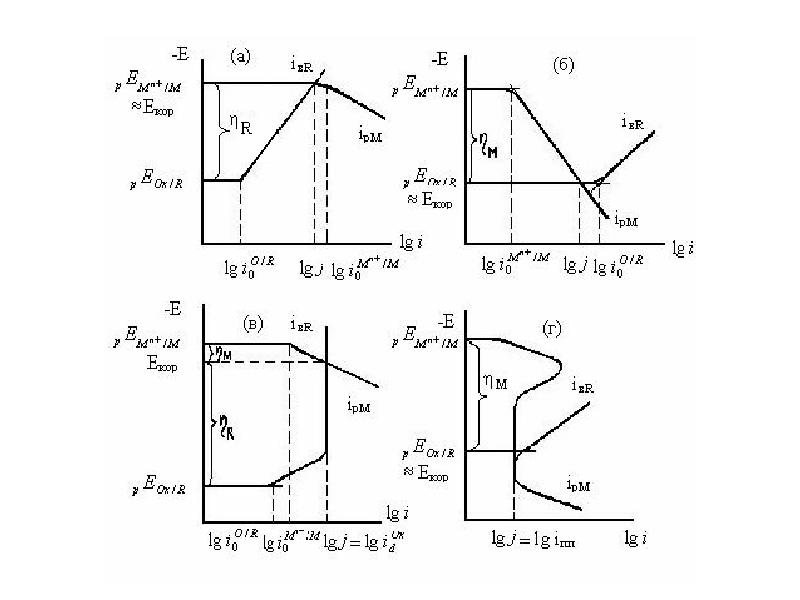
Рис. а,б иллюстрируют роль i0. Если , процесс протекает с катодным контролем (рис. а) и изменение только катодной кривой влияет на j, почти не меняя Екор рЕМn+/M. Перенапряжение растворения металла M 0. Обратный случай представлен на рис. б , где изменение j обусловлено влиянием различных факторов на анодный процесс, а перенапряжение выделения восстановителя R 0. По первому варианту корродируют амальгамы щелочных металлов, а по второму – благородные металлы при низкой [Mn+].
Рис. а,б иллюстрируют роль i0. Если , процесс протекает с катодным контролем (рис. а) и изменение только катодной кривой влияет на j, почти не меняя Екор рЕМn+/M. Перенапряжение растворения металла M 0. Обратный случай представлен на рис. б , где изменение j обусловлено влиянием различных факторов на анодный процесс, а перенапряжение выделения восстановителя R 0. По первому варианту корродируют амальгамы щелочных металлов, а по второму – благородные металлы при низкой [Mn+].
Слайд 14
Описание слайда:
На рис. в,г показана роль крутизны поляризационных кривых. При bк , что имеет место в области предельного тока диффузии Ох, величина j определяется , т.е. iвR. Этот случай описывает коррозию сталей в морской и пресной воде, а также в грунте, которая протекает с кислородной деполяризацией. Для пассивирующихся металлов в пассивной области bа и коррозия лимитируется плотностью тока полной пассивации iпп.
На рис. в,г показана роль крутизны поляризационных кривых. При bк , что имеет место в области предельного тока диффузии Ох, величина j определяется , т.е. iвR. Этот случай описывает коррозию сталей в морской и пресной воде, а также в грунте, которая протекает с кислородной деполяризацией. Для пассивирующихся металлов в пассивной области bа и коррозия лимитируется плотностью тока полной пассивации iпп.
Слайд 15
Описание слайда:
Сложные коррозионные системы
Короткозамкнутая система ( R0), у которой поверхность всех металлов, находящихся в электрическом контакте, эквипотенциальна, т.е. устанавливается один стационарный .
Площади металлов различны, условие стационарности оперирует со значениями J, а не i.
JpM = JвR ()
Это соотношение для нескольких М. или для суммарных Jа = Jк ()
Слайд 16
Описание слайда:
Суммарные кривые E-Ja, E-Jк
.
Слайд 17
Описание слайда:
Кривая ( )
Кривая ( )
(при заданном Е) начинается от
и до совпадает с кривой
т.к. при этих Е При Е нужно складывать
Пример сложения при Е1: ( отрезок 0-3) = ( 0-2) + (0-1), при этом отрезки 2-3 и 0-1 равны. Аналогично строится кривая
Слайд 18
Описание слайда:
при М1 и М2 являются анодами, причем
при М1 и М2 являются анодами, причем
, а М3 – катод. При этом
| + |= = Jг
Эта диаграмма дает информацию о внешних токах, а не о скоростях электродных реакций JpM и JвR .
Слайд 19
Описание слайда:
Используя J вместо i , получаем
Используя J вместо i , получаем
JpM = Jа + JвR ()
JвR = Jк + J pM ()
Полная скорость растворения М (JpM) складывается из скорости анодного растворения (Jа) и саморастворения за счет параллельно протекающей катодной реакции (JвR ). Полная скорость выделения R (JвR ) больше скорости катодного выделения R (Jк) на величину скорости саморастворения без внешнего тока (JpM) . Т.к. Jа J pM и Jк JвR , скорость гальванической коррозии Jг меньше реальной скорости коррозии J = JpM = JвR при .
Слайд 20
Описание слайда:
Парциальные кривые
Слайд 21
Описание слайда:
Эти кривые идут от равновесного потенциала, а не от Екор. Аналогично проводится суммирование.
Эти кривые идут от равновесного потенциала, а не от Екор. Аналогично проводится суммирование.
Кривая начинается от наиболее отрицательного М. Все металлы корродируют в одной Red/Ox – системе, катодные кривые выходят из одной точки и при каждом Е нужно складывать 3 тока. Точка пересечения полученных кривых дает J Jг и .
Слайд 22
Описание слайда:
По данным рис. М1 – анод, М2 – слабый катод, а М3 – более эффективный катод. Эта диаграмма дает также информацию об изменении устойчивости М в многоэлектродной системе по сравнению с чистым М. Для чистого М1 при
По данным рис. М1 – анод, М2 – слабый катод, а М3 – более эффективный катод. Эта диаграмма дает также информацию об изменении устойчивости М в многоэлектродной системе по сравнению с чистым М. Для чистого М1 при
= меньше, чем при . Следовательно, М1 за счет электрического контакта с более положительными металлами увеличивает , т.к. , а скорость АР растет с Е.
Для наиболее положительного М3 скорость растворения при контакте с более отрицательным падает до 0,т.к. .
У М2, где , коррозионная стойкость практически не меняется.
Скачать презентацию на тему Виды контроля коррозии можно ниже: