Теория стереопары снимков презентация
Содержание
- 2. 5.1 Элементы ориентирования стереопары По одиночному снимку можно получить лишь две
- 3. На практике фотографирование с двух точек базиса чаще всего выполняют одной
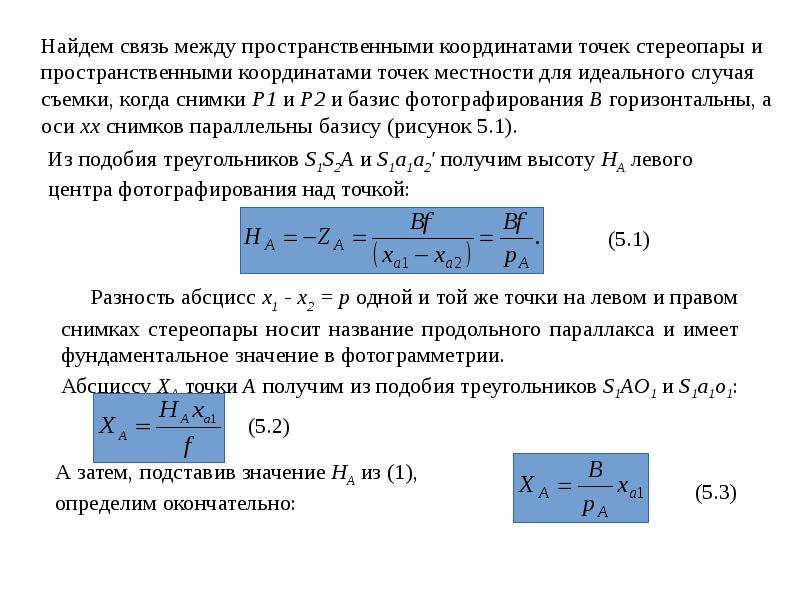
- 7. 5.2 Формулы координат и превышений для стереопары горизонтальных снимков
- 14. Взаимное ориентирование двух снимков стереопары можно выполнить двумя основными способами:
- 24. Если элементы внешнего ориентирования модели известны, то геодезические координаты Хг, Уг,
- 25. В формулах 5.12 семь неизвестных элементов внешнего ориентирования. Одна опорная геодезическая
- 27. Скачать презентацию














Слайды и текст этой презентации
Слайд 1
Описание слайда:
ЛЕКЦИЯ № 5 «ТЕОРИЯ СТЕРЕОПАРЫ СНИМКОВ»
5.1 Элементы ориентирования стереопары
5.2 Формулы координат и превышений для стереопары горизонтальных снимков
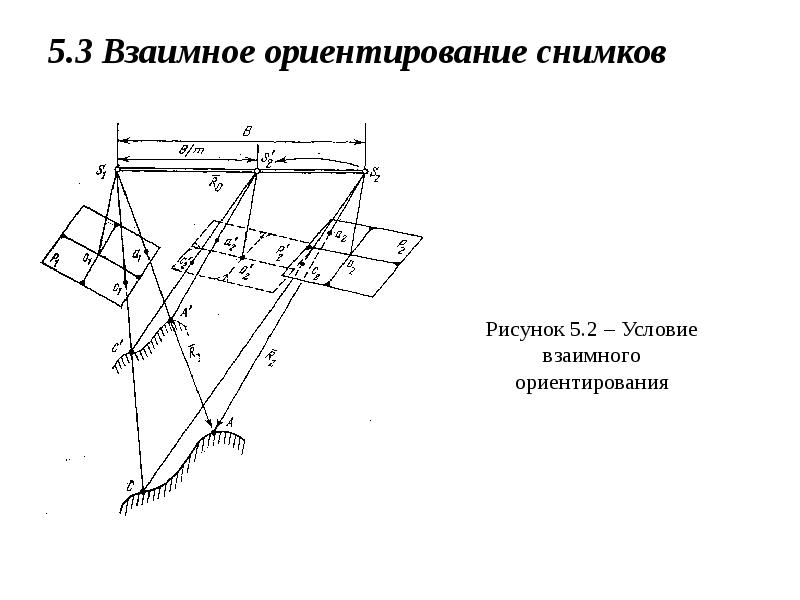
5.3 Взаимное ориентирование снимков
5.4 Элементы внешнего ориентирование геометрической модели
5.5 Понятие об аналитическом способе внешнего ориентирования модели
Слайд 2
Описание слайда:
5.1 Элементы ориентирования стереопары
По одиночному снимку можно получить лишь две пространственные координаты Х, Y. Для определения третьей координаты Z необходимо взять второй независимый снимок, полученный с другой точки пространства.
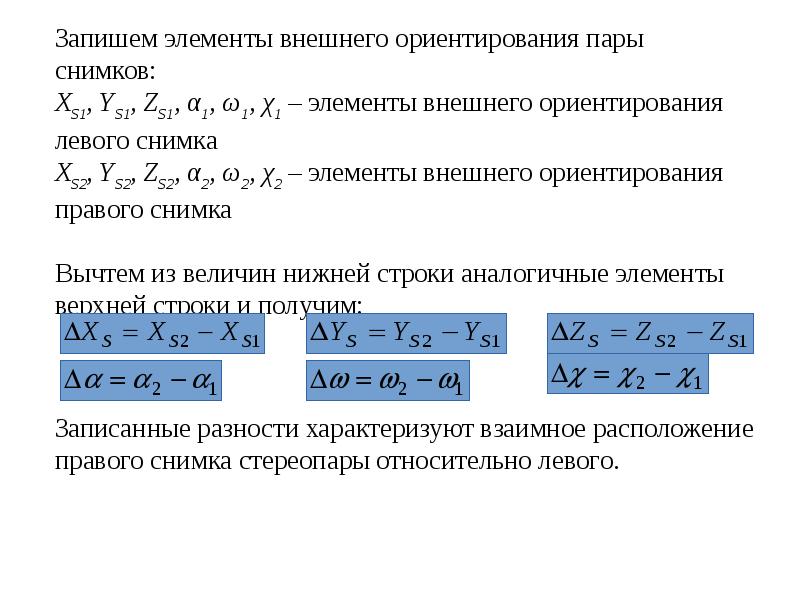
Каждый снимок в отдельности имеет девять элементов ориентирования, из которых три f, x0, y0 – элементы внутреннего ориентирования и шесть XS, YS, ZS, α, ω, χ (Xs, Ys, Zs, α0,t, χ) – элементы внешнего ориентирования. Следовательно, стереопара снимков должна иметь элементов ориентирования в два раза больше.
Слайд 3
Описание слайда:
На практике фотографирование с двух точек базиса чаще всего выполняют одной и той же фотокамерой, поэтому обычно считают, что элементы внутреннего ориентирования обоих снимков стереопары одинаковы.
На практике фотографирование с двух точек базиса чаще всего выполняют одной и той же фотокамерой, поэтому обычно считают, что элементы внутреннего ориентирования обоих снимков стереопары одинаковы.
Слайд 4
Описание слайда:
Слайд 5
Описание слайда:
Слайд 6
Описание слайда:
Слайд 7
Описание слайда:
5.2 Формулы координат и превышений для стереопары горизонтальных снимков
Слайд 8
Описание слайда:
Слайд 9
Описание слайда:
Слайд 10
Описание слайда:
Слайд 11
Описание слайда:
Слайд 12
Описание слайда:
Слайд 13
Описание слайда:
Слайд 14
Описание слайда:
Взаимное ориентирование двух снимков стереопары можно выполнить двумя основными способами:
Взаимное ориентирование двух снимков стереопары можно выполнить двумя основными способами:
оставив левый снимок P1 неподвижным, развернуть правый снимок относительно левого; при этом, как следует из рисунка 2, величина базиса В не имеет значения;
оставив базис В неподвижным (условно горизонтальным), угловыми движениями левого и правого снимков развернуть их относительно базиса.
В связи с этим различают две системы элементов взаимного ориентирования, из которых первая носит название системы координат левого снимка (рисунок 5.3), а другая — базисной системы (рисунок 5.4).
Слайд 15
Описание слайда:
Слайд 16
Описание слайда:
Слайд 17
Описание слайда:
Слайд 18
Описание слайда:
Слайд 19
Описание слайда:
Слайд 20
Описание слайда:
Слайд 21
Описание слайда:
Слайд 22
Описание слайда:
Слайд 23
Описание слайда:
Слайд 24
Описание слайда:
Если элементы внешнего ориентирования модели известны, то геодезические координаты Хг, Уг, Zг любой точки на этой модели можно определить по формулам:
Если элементы внешнего ориентирования модели известны, то геодезические координаты Хг, Уг, Zг любой точки на этой модели можно определить по формулам:
Хг = XSl + (a1X + a2Y + a3Z) m,
Yг = YSl +(b1X +b2Y + b3Z)m, (5.12)
Zг= ZSl + (c1X + c2Y + c3Z) m,
где Xs1, Ys1, Zs1, — геодезические координаты левого центра проектирования S1 являющегося началом фотограмметрической пространственной системы координат модели;
X, Y, Z — фотограмметрические координаты точки модели;
т — знаменатель масштаба модели;
ai, bi, сi — направляющие косинусы, определяющие угловые повороты фотограмметрической системы координат модели относительно геодезической системы координат (на углы ось α1, ω1, χ1 или iy, iz,ω1).
Слайд 25
Описание слайда:
В формулах 5.12 семь неизвестных элементов внешнего ориентирования. Одна опорная геодезическая точка, имеющая три пространственные координаты Хг, Уг, Zг, позволяет составить три уравнения с семью неизвестными.
В формулах 5.12 семь неизвестных элементов внешнего ориентирования. Одна опорная геодезическая точка, имеющая три пространственные координаты Хг, Уг, Zг, позволяет составить три уравнения с семью неизвестными.
Следовательно, для решения задачи необходимо иметь не менее трех геодезических точек. Причем достаточно, чтобы две из них имели по три пространственные координаты. А третья имела бы только высоту.
Слайд 26
Описание слайда:
Скачать презентацию на тему Теория стереопары снимков можно ниже: